ROS2 Humble测试版功能包列表_ros-humble-pacmod3-msgs-程序员宅基地
2022-05-04列表如下1040个:
sudo apt install ros-humble-
Display all 1040 possibilities? (y or n)
ros-humble-acado-vendor ros-humble-picknik-ament-copyright
ros-humble-acado-vendor-dbgsym ros-humble-plotjuggler-msgs
ros-humble-ackermann-msgs ros-humble-plotjuggler-msgs-dbgsym
ros-humble-ackermann-msgs-dbgsym ros-humble-pluginlib
ros-humble-actionlib-msgs ros-humble-point-cloud-msg-wrapper
ros-humble-actionlib-msgs-dbgsym ros-humble-pointcloud-to-laserscan
ros-humble-action-msgs ros-humble-pointcloud-to-laserscan-dbgsym
ros-humble-action-msgs-dbgsym ros-humble-position-controllers
ros-humble-action-tutorials-cpp ros-humble-position-controllers-dbgsym
ros-humble-action-tutorials-cpp-dbgsym ros-humble-pybind11-vendor
ros-humble-action-tutorials-interfaces ros-humble-python-cmake-module
ros-humble-action-tutorials-interfaces-dbgsym ros-humble-python-orocos-kdl-vendor
ros-humble-action-tutorials-py ros-humble-python-qt-binding
ros-humble-adaptive-component ros-humble-qpoases-vendor
ros-humble-adaptive-component-dbgsym ros-humble-qt-dotgraph
ros-humble-ament-acceleration ros-humble-qt-gui
ros-humble-ament-clang-format ros-humble-qt-gui-app
ros-humble-ament-clang-tidy ros-humble-qt-gui-core
ros-humble-ament-cmake ros-humble-qt-gui-cpp
ros-humble-ament-cmake-auto ros-humble-qt-gui-cpp-dbgsym
ros-humble-ament-cmake-catch2 ros-humble-qt-gui-py-common
ros-humble-ament-cmake-clang-format ros-humble-quality-of-service-demo-cpp
ros-humble-ament-cmake-clang-tidy ros-humble-quality-of-service-demo-cpp-dbgsym
ros-humble-ament-cmake-copyright ros-humble-quality-of-service-demo-py
ros-humble-ament-cmake-core ros-humble-radar-msgs
ros-humble-ament-cmake-cppcheck ros-humble-radar-msgs-dbgsym
ros-humble-ament-cmake-cpplint ros-humble-random-numbers
ros-humble-ament-cmake-export-definitions ros-humble-random-numbers-dbgsym
ros-humble-ament-cmake-export-dependencies ros-humble-rc-common-msgs
ros-humble-ament-cmake-export-include-directories ros-humble-rc-common-msgs-dbgsym
ros-humble-ament-cmake-export-interfaces ros-humble-rcdiscover
ros-humble-ament-cmake-export-libraries ros-humble-rcdiscover-dbgsym
ros-humble-ament-cmake-export-link-flags ros-humble-rc-dynamics-api
ros-humble-ament-cmake-export-targets ros-humble-rc-dynamics-api-dbgsym
ros-humble-ament-cmake-flake8 ros-humble-rc-genicam-api
ros-humble-ament-cmake-gen-version-h ros-humble-rc-genicam-api-dbgsym
ros-humble-ament-cmake-gmock ros-humble-rc-genicam-driver
ros-humble-ament-cmake-google-benchmark ros-humble-rc-genicam-driver-dbgsym
ros-humble-ament-cmake-gtest ros-humble-rcl
ros-humble-ament-cmake-include-directories ros-humble-rcl-action
ros-humble-ament-cmake-libraries ros-humble-rcl-action-dbgsym
ros-humble-ament-cmake-lint-cmake ros-humble-rclc
ros-humble-ament-cmake-mypy ros-humble-rclc-dbgsym
ros-humble-ament-cmake-nose ros-humble-rclc-examples
ros-humble-ament-cmake-pclint ros-humble-rclc-examples-dbgsym
ros-humble-ament-cmake-pep257 ros-humble-rclc-lifecycle
ros-humble-ament-cmake-pycodestyle ros-humble-rclc-lifecycle-dbgsym
ros-humble-ament-cmake-pyflakes ros-humble-rclc-parameter
ros-humble-ament-cmake-pytest ros-humble-rclcpp
ros-humble-ament-cmake-python ros-humble-rclcpp-action
ros-humble-ament-cmake-ros ros-humble-rclcpp-action-dbgsym
ros-humble-ament-cmake-target-dependencies ros-humble-rclcpp-components
ros-humble-ament-cmake-test ros-humble-rclcpp-components-dbgsym
ros-humble-ament-cmake-uncrustify ros-humble-rclcpp-dbgsym
ros-humble-ament-cmake-version ros-humble-rclcpp-lifecycle
ros-humble-ament-cmake-xmllint ros-humble-rclcpp-lifecycle-dbgsym
ros-humble-ament-copyright ros-humble-rcl-dbgsym
ros-humble-ament-cppcheck ros-humble-rcl-interfaces
ros-humble-ament-cpplint ros-humble-rcl-interfaces-dbgsym
ros-humble-ament-flake8 ros-humble-rcl-lifecycle
ros-humble-ament-index-cpp ros-humble-rcl-lifecycle-dbgsym
ros-humble-ament-index-cpp-dbgsym ros-humble-rcl-logging-interface
ros-humble-ament-index-python ros-humble-rcl-logging-interface-dbgsym
ros-humble-ament-lint ros-humble-rcl-logging-noop
ros-humble-ament-lint-auto ros-humble-rcl-logging-noop-dbgsym
ros-humble-ament-lint-cmake ros-humble-rcl-logging-spdlog
ros-humble-ament-lint-common ros-humble-rcl-logging-spdlog-dbgsym
ros-humble-ament-mypy ros-humble-rclpy
ros-humble-ament-nodl ros-humble-rcl-yaml-param-parser
ros-humble-ament-package ros-humble-rcl-yaml-param-parser-dbgsym
ros-humble-ament-pclint ros-humble-rcpputils
ros-humble-ament-pep257 ros-humble-rcpputils-dbgsym
ros-humble-ament-pycodestyle ros-humble-rc-reason-clients
ros-humble-ament-pyflakes ros-humble-rc-reason-msgs
ros-humble-ament-uncrustify ros-humble-rc-reason-msgs-dbgsym
ros-humble-ament-vitis ros-humble-rcss3d-agent
ros-humble-ament-xmllint ros-humble-rcss3d-agent-basic
ros-humble-angles ros-humble-rcss3d-agent-basic-dbgsym
ros-humble-apex-test-tools ros-humble-rcss3d-agent-dbgsym
ros-humble-apriltag ros-humble-rcss3d-agent-msgs
ros-humble-apriltag-dbgsym ros-humble-rcss3d-agent-msgs-dbgsym
ros-humble-asio-cmake-module ros-humble-rcutils
ros-humble-async-web-server-cpp ros-humble-rcutils-dbgsym
ros-humble-async-web-server-cpp-dbgsym ros-humble-realtime-tools
ros-humble-automotive-autonomy-msgs ros-humble-resource-retriever
ros-humble-automotive-navigation-msgs ros-humble-resource-retriever-dbgsym
ros-humble-automotive-navigation-msgs-dbgsym ros-humble-rmf-battery
ros-humble-automotive-platform-msgs ros-humble-rmf-battery-dbgsym
ros-humble-automotive-platform-msgs-dbgsym ros-humble-rmf-building-map-msgs
ros-humble-autoware-auto-msgs ros-humble-rmf-building-map-msgs-dbgsym
ros-humble-autoware-auto-msgs-dbgsym ros-humble-rmf-building-map-tools
ros-humble-avt-vimba-camera ros-humble-rmf-building-sim-common
ros-humble-avt-vimba-camera-dbgsym ros-humble-rmf-building-sim-common-dbgsym
ros-humble-backward-ros ros-humble-rmf-building-sim-ignition-plugins
ros-humble-backward-ros-dbgsym ros-humble-rmf-charger-msgs
ros-humble-behaviortree-cpp-v3 ros-humble-rmf-charger-msgs-dbgsym
ros-humble-behaviortree-cpp-v3-dbgsym ros-humble-rmf-cmake-uncrustify
ros-humble-bno055 ros-humble-rmf-demos-assets
ros-humble-bond ros-humble-rmf-demos-dashboard-resources
ros-humble-bond-core ros-humble-rmf-demos-panel
ros-humble-bondcpp ros-humble-rmf-demos-tasks
ros-humble-bondcpp-dbgsym ros-humble-rmf-dispenser-msgs
ros-humble-bond-dbgsym ros-humble-rmf-dispenser-msgs-dbgsym
ros-humble-builtin-interfaces ros-humble-rmf-door-msgs
ros-humble-builtin-interfaces-dbgsym ros-humble-rmf-door-msgs-dbgsym
ros-humble-camera-calibration ros-humble-rmf-fleet-msgs
ros-humble-camera-calibration-parsers ros-humble-rmf-fleet-msgs-dbgsym
ros-humble-camera-calibration-parsers-dbgsym ros-humble-rmf-ingestor-msgs
ros-humble-camera-info-manager ros-humble-rmf-ingestor-msgs-dbgsym
ros-humble-camera-info-manager-dbgsym ros-humble-rmf-lift-msgs
ros-humble-can-msgs ros-humble-rmf-lift-msgs-dbgsym
ros-humble-can-msgs-dbgsym ros-humble-rmf-robot-sim-common
ros-humble-cartographer ros-humble-rmf-robot-sim-common-dbgsym
ros-humble-cartographer-dbgsym ros-humble-rmf-robot-sim-ignition-plugins
ros-humble-cartographer-ros ros-humble-rmf-site-map-msgs
ros-humble-cartographer-ros-dbgsym ros-humble-rmf-site-map-msgs-dbgsym
ros-humble-cartographer-ros-msgs ros-humble-rmf-task
ros-humble-cartographer-ros-msgs-dbgsym ros-humble-rmf-task-dbgsym
ros-humble-cartographer-rviz ros-humble-rmf-task-msgs
ros-humble-cartographer-rviz-dbgsym ros-humble-rmf-task-msgs-dbgsym
ros-humble-class-loader ros-humble-rmf-traffic
ros-humble-class-loader-dbgsym ros-humble-rmf-traffic-dbgsym
ros-humble-color-names ros-humble-rmf-traffic-editor
ros-humble-color-names-dbgsym ros-humble-rmf-traffic-editor-assets
ros-humble-common-interfaces ros-humble-rmf-traffic-editor-dbgsym
ros-humble-composition ros-humble-rmf-traffic-editor-test-maps
ros-humble-composition-dbgsym ros-humble-rmf-traffic-msgs
ros-humble-composition-interfaces ros-humble-rmf-traffic-msgs-dbgsym
ros-humble-composition-interfaces-dbgsym ros-humble-rmf-utils
ros-humble-compressed-depth-image-transport ros-humble-rmf-utils-dbgsym
ros-humble-compressed-depth-image-transport-dbgsym ros-humble-rmf-visualization-building-systems
ros-humble-compressed-image-transport ros-humble-rmf-visualization-fleet-states
ros-humble-compressed-image-transport-dbgsym ros-humble-rmf-visualization-msgs
ros-humble-console-bridge-vendor ros-humble-rmf-visualization-msgs-dbgsym
ros-humble-controller-interface ros-humble-rmf-workcell-msgs
ros-humble-controller-interface-dbgsym ros-humble-rmf-workcell-msgs-dbgsym
ros-humble-controller-manager ros-humble-rmw
ros-humble-controller-manager-dbgsym ros-humble-rmw-connextdds
ros-humble-controller-manager-msgs ros-humble-rmw-connextdds-common
ros-humble-controller-manager-msgs-dbgsym ros-humble-rmw-cyclonedds-cpp
ros-humble-control-msgs ros-humble-rmw-cyclonedds-cpp-dbgsym
ros-humble-control-msgs-dbgsym ros-humble-rmw-dbgsym
ros-humble-control-toolbox ros-humble-rmw-dds-common
ros-humble-control-toolbox-dbgsym ros-humble-rmw-dds-common-dbgsym
ros-humble-cudnn-cmake-module ros-humble-rmw-fastrtps-cpp
ros-humble-cv-bridge ros-humble-rmw-fastrtps-cpp-dbgsym
ros-humble-cv-bridge-dbgsym ros-humble-rmw-fastrtps-dynamic-cpp
ros-humble-cyclonedds ros-humble-rmw-fastrtps-dynamic-cpp-dbgsym
ros-humble-cyclonedds-dbgsym ros-humble-rmw-fastrtps-shared-cpp
ros-humble-demo-nodes-cpp ros-humble-rmw-fastrtps-shared-cpp-dbgsym
ros-humble-demo-nodes-cpp-dbgsym ros-humble-rmw-implementation
ros-humble-demo-nodes-cpp-native ros-humble-rmw-implementation-cmake
ros-humble-demo-nodes-cpp-native-dbgsym ros-humble-rmw-implementation-dbgsym
ros-humble-demo-nodes-py ros-humble-robot-localization
ros-humble-depthimage-to-laserscan ros-humble-robot-localization-dbgsym
ros-humble-depthimage-to-laserscan-dbgsym ros-humble-robot-state-publisher
ros-humble-desktop ros-humble-robot-state-publisher-dbgsym
ros-humble-diagnostic-aggregator ros-humble-ros2acceleration
ros-humble-diagnostic-aggregator-dbgsym ros-humble-ros2action
ros-humble-diagnostic-msgs ros-humble-ros2bag
ros-humble-diagnostic-msgs-dbgsym ros-humble-ros2cli
ros-humble-diagnostic-updater ros-humble-ros2cli-common-extensions
ros-humble-diagnostic-updater-dbgsym ros-humble-ros2cli-test-interfaces
ros-humble-diff-drive-controller ros-humble-ros2cli-test-interfaces-dbgsym
ros-humble-diff-drive-controller-dbgsym ros-humble-ros2component
ros-humble-dolly-follow ros-humble-ros2-control
ros-humble-dolly-follow-dbgsym ros-humble-ros2controlcli
ros-humble-dolly-ignition ros-humble-ros2-controllers
ros-humble-domain-bridge ros-humble-ros2-controllers-test-nodes
ros-humble-domain-bridge-dbgsym ros-humble-ros2-control-test-assets
ros-humble-domain-coordinator ros-humble-ros2doctor
ros-humble-dummy-map-server ros-humble-ros2interface
ros-humble-dummy-map-server-dbgsym ros-humble-ros2launch
ros-humble-dummy-robot-bringup ros-humble-ros2launch-security
ros-humble-dummy-sensors ros-humble-ros2launch-security-examples
ros-humble-dummy-sensors-dbgsym ros-humble-ros2launch-security-examples-dbgsym
ros-humble-dynamic-edt-3d ros-humble-ros2lifecycle
ros-humble-dynamic-edt-3d-dbgsym ros-humble-ros2lifecycle-test-fixtures
ros-humble-dynamixel-sdk ros-humble-ros2lifecycle-test-fixtures-dbgsym
ros-humble-dynamixel-sdk-custom-interfaces ros-humble-ros2multicast
ros-humble-dynamixel-sdk-custom-interfaces-dbgsym ros-humble-ros2node
ros-humble-dynamixel-sdk-dbgsym ros-humble-ros2nodl
ros-humble-dynamixel-sdk-examples ros-humble-ros2param
ros-humble-dynamixel-sdk-examples-dbgsym ros-humble-ros2pkg
ros-humble-effort-controllers ros-humble-ros2run
ros-humble-effort-controllers-dbgsym ros-humble-ros2service
ros-humble-eigen3-cmake-module ros-humble-ros2-socketcan
ros-humble-eigen-stl-containers ros-humble-ros2-socketcan-dbgsym
ros-humble-example-interfaces ros-humble-ros2test
ros-humble-example-interfaces-dbgsym ros-humble-ros2topic
ros-humble-examples-rclcpp-async-client ros-humble-ros2trace
ros-humble-examples-rclcpp-async-client-dbgsym ros-humble-ros2trace-analysis
ros-humble-examples-rclcpp-cbg-executor ros-humble-rosapi
ros-humble-examples-rclcpp-cbg-executor-dbgsym ros-humble-rosapi-msgs
ros-humble-examples-rclcpp-minimal-action-client ros-humble-rosapi-msgs-dbgsym
ros-humble-examples-rclcpp-minimal-action-client-dbgsym ros-humble-rosbag2
ros-humble-examples-rclcpp-minimal-action-server ros-humble-rosbag2-compression
ros-humble-examples-rclcpp-minimal-action-server-dbgsym ros-humble-rosbag2-compression-dbgsym
ros-humble-examples-rclcpp-minimal-client ros-humble-rosbag2-compression-zstd
ros-humble-examples-rclcpp-minimal-client-dbgsym ros-humble-rosbag2-compression-zstd-dbgsym
ros-humble-examples-rclcpp-minimal-composition ros-humble-rosbag2-cpp
ros-humble-examples-rclcpp-minimal-composition-dbgsym ros-humble-rosbag2-cpp-dbgsym
ros-humble-examples-rclcpp-minimal-publisher ros-humble-rosbag2-interfaces
ros-humble-examples-rclcpp-minimal-publisher-dbgsym ros-humble-rosbag2-interfaces-dbgsym
ros-humble-examples-rclcpp-minimal-service ros-humble-rosbag2-performance-benchmarking
ros-humble-examples-rclcpp-minimal-service-dbgsym ros-humble-rosbag2-py
ros-humble-examples-rclcpp-minimal-subscriber ros-humble-rosbag2-storage
ros-humble-examples-rclcpp-minimal-subscriber-dbgsym ros-humble-rosbag2-storage-dbgsym
ros-humble-examples-rclcpp-minimal-timer ros-humble-rosbag2-storage-default-plugins
ros-humble-examples-rclcpp-minimal-timer-dbgsym ros-humble-rosbag2-storage-default-plugins-dbgsym
ros-humble-examples-rclcpp-multithreaded-executor ros-humble-rosbag2-storage-mcap
ros-humble-examples-rclcpp-multithreaded-executor-dbgsym ros-humble-rosbag2-storage-mcap-dbgsym
ros-humble-examples-rclcpp-wait-set ros-humble-rosbag2-test-common
ros-humble-examples-rclcpp-wait-set-dbgsym ros-humble-rosbag2-tests
ros-humble-examples-rclpy-executors ros-humble-rosbag2-transport
ros-humble-examples-rclpy-guard-conditions ros-humble-rosbag2-transport-dbgsym
ros-humble-examples-rclpy-minimal-action-client ros-humble-ros-base
ros-humble-examples-rclpy-minimal-action-server ros-humble-rosbridge-library
ros-humble-examples-rclpy-minimal-client ros-humble-rosbridge-msgs
ros-humble-examples-rclpy-minimal-publisher ros-humble-rosbridge-msgs-dbgsym
ros-humble-examples-rclpy-minimal-service ros-humble-rosbridge-server
ros-humble-examples-rclpy-minimal-subscriber ros-humble-rosbridge-suite
ros-humble-examples-rclpy-pointcloud-publisher ros-humble-rosbridge-test-msgs
ros-humble-examples-tf2-py ros-humble-rosbridge-test-msgs-dbgsym
ros-humble-fastcdr ros-humble-ros-core
ros-humble-fastcdr-dbgsym ros-humble-ros-environment
ros-humble-fastrtps ros-humble-rosgraph-msgs
ros-humble-fastrtps-cmake-module ros-humble-rosgraph-msgs-dbgsym
ros-humble-fastrtps-dbgsym ros-humble-rosidl-adapter
ros-humble-filters ros-humble-rosidl-cli
ros-humble-filters-dbgsym ros-humble-rosidl-cmake
ros-humble-fmi-adapter ros-humble-rosidl-default-generators
ros-humble-fmi-adapter-dbgsym ros-humble-rosidl-default-runtime
ros-humble-fmi-adapter-examples ros-humble-rosidl-generator-c
ros-humble-fmilibrary-vendor ros-humble-rosidl-generator-cpp
ros-humble-fmilibrary-vendor-dbgsym ros-humble-rosidl-generator-dds-idl
ros-humble-fogros2 ros-humble-rosidl-generator-py
ros-humble-fogros2-examples ros-humble-rosidl-parser
ros-humble-foonathan-memory-vendor ros-humble-rosidl-runtime-c
ros-humble-force-torque-sensor-broadcaster ros-humble-rosidl-runtime-c-dbgsym
ros-humble-force-torque-sensor-broadcaster-dbgsym ros-humble-rosidl-runtime-cpp
ros-humble-forward-command-controller ros-humble-rosidl-runtime-py
ros-humble-forward-command-controller-dbgsym ros-humble-rosidl-typesupport-c
ros-humble-four-wheel-steering-msgs ros-humble-rosidl-typesupport-c-dbgsym
ros-humble-four-wheel-steering-msgs-dbgsym ros-humble-rosidl-typesupport-cpp
ros-humble-geodesy ros-humble-rosidl-typesupport-cpp-dbgsym
ros-humble-geographic-info ros-humble-rosidl-typesupport-fastrtps-c
ros-humble-geographic-msgs ros-humble-rosidl-typesupport-fastrtps-c-dbgsym
ros-humble-geographic-msgs-dbgsym ros-humble-rosidl-typesupport-fastrtps-cpp
ros-humble-geometric-shapes ros-humble-rosidl-typesupport-fastrtps-cpp-dbgsym
ros-humble-geometric-shapes-dbgsym ros-humble-rosidl-typesupport-interface
ros-humble-geometry2 ros-humble-rosidl-typesupport-introspection-c
ros-humble-geometry-msgs ros-humble-rosidl-typesupport-introspection-c-dbgsym
ros-humble-geometry-msgs-dbgsym ros-humble-rosidl-typesupport-introspection-cpp
ros-humble-geometry-tutorials ros-humble-rosidl-typesupport-introspection-cpp-dbgsym
ros-humble-gmock-vendor ros-humble-ros-ign
ros-humble-google-benchmark-vendor ros-humble-ros-ign-bridge
ros-humble-google-benchmark-vendor-dbgsym ros-humble-ros-ign-bridge-dbgsym
ros-humble-gps-msgs ros-humble-ros-ign-gazebo
ros-humble-gps-msgs-dbgsym ros-humble-ros-ign-gazebo-dbgsym
ros-humble-gps-tools ros-humble-ros-ign-gazebo-demos
ros-humble-gps-tools-dbgsym ros-humble-ros-ign-image
ros-humble-graph-msgs ros-humble-ros-ign-image-dbgsym
ros-humble-graph-msgs-dbgsym ros-humble-ros-ign-interfaces
ros-humble-grbl-msgs ros-humble-ros-ign-interfaces-dbgsym
ros-humble-grbl-msgs-dbgsym ros-humble-ros-image-to-qimage
ros-humble-grbl-ros ros-humble-ros-testing
ros-humble-gripper-controllers ros-humble-ros-workspace
ros-humble-gripper-controllers-dbgsym ros-humble-rot-conv
ros-humble-gscam ros-humble-rot-conv-dbgsym
ros-humble-gscam-dbgsym ros-humble-rpyutils
ros-humble-gtest-vendor ros-humble-rqt
ros-humble-hardware-interface ros-humble-rqt-action
ros-humble-hardware-interface-dbgsym ros-humble-rqt-bag
ros-humble-hash-library-vendor ros-humble-rqt-bag-plugins
ros-humble-hash-library-vendor-dbgsym ros-humble-rqt-common-plugins
ros-humble-hls-lfcd-lds-driver ros-humble-rqt-console
ros-humble-hls-lfcd-lds-driver-dbgsym ros-humble-rqt-graph
ros-humble-iceoryx-binding-c ros-humble-rqt-gui
ros-humble-iceoryx-binding-c-dbgsym ros-humble-rqt-gui-cpp
ros-humble-iceoryx-hoofs ros-humble-rqt-gui-cpp-dbgsym
ros-humble-iceoryx-hoofs-dbgsym ros-humble-rqt-gui-py
ros-humble-iceoryx-posh ros-humble-rqt-image-overlay
ros-humble-iceoryx-posh-dbgsym ros-humble-rqt-image-overlay-dbgsym
ros-humble-ifm3d-core ros-humble-rqt-image-overlay-layer
ros-humble-ignition-cmake2-vendor ros-humble-rqt-image-view
ros-humble-ignition-math6-vendor ros-humble-rqt-image-view-dbgsym
ros-humble-image-common ros-humble-rqt-moveit
ros-humble-image-geometry ros-humble-rqt-msg
ros-humble-image-geometry-dbgsym ros-humble-rqt-plot
ros-humble-image-proc ros-humble-rqt-publisher
ros-humble-image-proc-dbgsym ros-humble-rqt-py-common
ros-humble-image-publisher ros-humble-rqt-py-console
ros-humble-image-publisher-dbgsym ros-humble-rqt-reconfigure
ros-humble-image-rotate ros-humble-rqt-robot-dashboard
ros-humble-image-rotate-dbgsym ros-humble-rqt-robot-monitor
ros-humble-image-tools ros-humble-rqt-robot-steering
ros-humble-image-tools-dbgsym ros-humble-rqt-runtime-monitor
ros-humble-image-transport ros-humble-rqt-service-caller
ros-humble-image-transport-dbgsym ros-humble-rqt-shell
ros-humble-image-transport-plugins ros-humble-rqt-srv
ros-humble-imu-filter-madgwick ros-humble-rqt-top
ros-humble-imu-filter-madgwick-dbgsym ros-humble-rqt-topic
ros-humble-imu-sensor-broadcaster ros-humble-rtabmap
ros-humble-imu-sensor-broadcaster-dbgsym ros-humble-rtabmap-dbgsym
ros-humble-interactive-markers ros-humble-rti-connext-dds-cmake-module
ros-humble-interactive-markers-dbgsym ros-humble-rttest
ros-humble-intra-process-demo ros-humble-rttest-dbgsym
ros-humble-intra-process-demo-dbgsym ros-humble-ruckig
ros-humble-io-context ros-humble-ruckig-dbgsym
ros-humble-io-context-dbgsym ros-humble-rviz2
ros-humble-joint-state-broadcaster ros-humble-rviz2-dbgsym
ros-humble-joint-state-broadcaster-dbgsym ros-humble-rviz-assimp-vendor
ros-humble-joint-state-publisher ros-humble-rviz-common
ros-humble-joint-state-publisher-gui ros-humble-rviz-common-dbgsym
ros-humble-joint-trajectory-controller ros-humble-rviz-default-plugins
ros-humble-joint-trajectory-controller-dbgsym ros-humble-rviz-default-plugins-dbgsym
ros-humble-joy ros-humble-rviz-imu-plugin
ros-humble-joy-dbgsym ros-humble-rviz-imu-plugin-dbgsym
ros-humble-joy-linux ros-humble-rviz-ogre-vendor
ros-humble-joy-linux-dbgsym ros-humble-rviz-ogre-vendor-dbgsym
ros-humble-joy-teleop ros-humble-rviz-rendering
ros-humble-kdl-parser ros-humble-rviz-rendering-dbgsym
ros-humble-kdl-parser-dbgsym ros-humble-rviz-rendering-tests
ros-humble-keyboard-handler ros-humble-rviz-visual-testing-framework
ros-humble-keyboard-handler-dbgsym ros-humble-rviz-visual-tools
ros-humble-key-teleop ros-humble-rviz-visual-tools-dbgsym
ros-humble-lanelet2 ros-humble-sdl2-vendor
ros-humble-lanelet2-core ros-humble-sensor-msgs
ros-humble-lanelet2-core-dbgsym ros-humble-sensor-msgs-dbgsym
ros-humble-lanelet2-examples ros-humble-sensor-msgs-py
ros-humble-lanelet2-examples-dbgsym ros-humble-serial-driver
ros-humble-lanelet2-io ros-humble-serial-driver-dbgsym
ros-humble-lanelet2-io-dbgsym ros-humble-shape-msgs
ros-humble-lanelet2-maps ros-humble-shape-msgs-dbgsym
ros-humble-lanelet2-projection ros-humble-shared-queues-vendor
ros-humble-lanelet2-projection-dbgsym ros-humble-simple-launch
ros-humble-lanelet2-python ros-humble-slider-publisher
ros-humble-lanelet2-python-dbgsym ros-humble-smacc2
ros-humble-lanelet2-routing ros-humble-smacc2-dbgsym
ros-humble-lanelet2-routing-dbgsym ros-humble-smacc2-msgs
ros-humble-lanelet2-traffic-rules ros-humble-smacc2-msgs-dbgsym
ros-humble-lanelet2-traffic-rules-dbgsym ros-humble-smclib
ros-humble-lanelet2-validation ros-humble-snowbot-operating-system
ros-humble-lanelet2-validation-dbgsym ros-humble-snowbot-operating-system-dbgsym
ros-humble-laser-filters ros-humble-soccer-marker-generation
ros-humble-laser-filters-dbgsym ros-humble-soccer-marker-generation-dbgsym
ros-humble-laser-geometry ros-humble-soccer-object-msgs
ros-humble-laser-geometry-dbgsym ros-humble-soccer-object-msgs-dbgsym
ros-humble-laser-proc ros-humble-soccer-vision-2d-msgs
ros-humble-laser-proc-dbgsym ros-humble-soccer-vision-2d-msgs-dbgsym
ros-humble-launch ros-humble-soccer-vision-3d-msgs
ros-humble-launch-param-builder ros-humble-soccer-vision-3d-msgs-dbgsym
ros-humble-launch-pytest ros-humble-soccer-vision-attribute-msgs
ros-humble-launch-ros ros-humble-soccer-vision-attribute-msgs-dbgsym
ros-humble-launch-system-modes ros-humble-sol-vendor
ros-humble-launch-testing ros-humble-spacenav
ros-humble-launch-testing-ament-cmake ros-humble-spacenav-dbgsym
ros-humble-launch-testing-examples ros-humble-spdlog-vendor
ros-humble-launch-testing-ros ros-humble-sqlite3-vendor
ros-humble-launch-xml ros-humble-srdfdom
ros-humble-launch-yaml ros-humble-srdfdom-dbgsym
ros-humble-lgsvl-msgs ros-humble-sros2
ros-humble-lgsvl-msgs-dbgsym ros-humble-sros2-cmake
ros-humble-libcurl-vendor ros-humble-statistics-msgs
ros-humble-libg2o ros-humble-statistics-msgs-dbgsym
ros-humble-libg2o-dbgsym ros-humble-std-msgs
ros-humble-libnabo ros-humble-std-msgs-dbgsym
ros-humble-libphidget22 ros-humble-std-srvs
ros-humble-libphidget22-dbgsym ros-humble-std-srvs-dbgsym
ros-humble-libpointmatcher ros-humble-stereo-image-proc
ros-humble-libpointmatcher-dbgsym ros-humble-stereo-image-proc-dbgsym
ros-humble-libstatistics-collector ros-humble-stereo-msgs
ros-humble-libstatistics-collector-dbgsym ros-humble-stereo-msgs-dbgsym
ros-humble-libyaml-vendor ros-humble-stubborn-buddies
ros-humble-libyaml-vendor-dbgsym ros-humble-stubborn-buddies-dbgsym
ros-humble-lifecycle ros-humble-stubborn-buddies-msgs
ros-humble-lifecycle-dbgsym ros-humble-stubborn-buddies-msgs-dbgsym
ros-humble-lifecycle-msgs ros-humble-swri-dbw-interface
ros-humble-lifecycle-msgs-dbgsym ros-humble-swri-math-util
ros-humble-lifecycle-py ros-humble-swri-math-util-dbgsym
ros-humble-logging-demo ros-humble-swri-opencv-util
ros-humble-logging-demo-dbgsym ros-humble-swri-prefix-tools
ros-humble-map-msgs ros-humble-swri-serial-util
ros-humble-map-msgs-dbgsym ros-humble-swri-system-util
ros-humble-marti-can-msgs ros-humble-system-modes
ros-humble-marti-can-msgs-dbgsym ros-humble-system-modes-dbgsym
ros-humble-marti-common-msgs ros-humble-system-modes-examples
ros-humble-marti-common-msgs-dbgsym ros-humble-system-modes-examples-dbgsym
ros-humble-marti-dbw-msgs ros-humble-system-modes-msgs
ros-humble-marti-dbw-msgs-dbgsym ros-humble-system-modes-msgs-dbgsym
ros-humble-marti-introspection-msgs ros-humble-tango-icons-vendor
ros-humble-marti-introspection-msgs-dbgsym ros-humble-teleop-tools
ros-humble-marti-nav-msgs ros-humble-teleop-tools-msgs
ros-humble-marti-nav-msgs-dbgsym ros-humble-teleop-tools-msgs-dbgsym
ros-humble-marti-perception-msgs ros-humble-teleop-twist-joy
ros-humble-marti-perception-msgs-dbgsym ros-humble-teleop-twist-joy-dbgsym
ros-humble-marti-sensor-msgs ros-humble-teleop-twist-keyboard
ros-humble-marti-sensor-msgs-dbgsym ros-humble-tensorrt-cmake-module
ros-humble-marti-status-msgs ros-humble-test-apex-test-tools
ros-humble-marti-status-msgs-dbgsym ros-humble-test-interface-files
ros-humble-marti-visualization-msgs ros-humble-test-launch-system-modes
ros-humble-marti-visualization-msgs-dbgsym ros-humble-test-msgs
ros-humble-mavlink ros-humble-test-msgs-dbgsym
ros-humble-mavros-msgs ros-humble-tf2
ros-humble-mavros-msgs-dbgsym ros-humble-tf2-bullet
ros-humble-mcap-vendor ros-humble-tf2-dbgsym
ros-humble-mcap-vendor-dbgsym ros-humble-tf2-eigen
ros-humble-menge-vendor ros-humble-tf2-eigen-kdl
ros-humble-menge-vendor-dbgsym ros-humble-tf2-eigen-kdl-dbgsym
ros-humble-message-filters ros-humble-tf2-geometry-msgs
ros-humble-message-filters-dbgsym ros-humble-tf2-kdl
ros-humble-micro-ros-diagnostic-bridge ros-humble-tf2-msgs
ros-humble-micro-ros-diagnostic-bridge-dbgsym ros-humble-tf2-msgs-dbgsym
ros-humble-micro-ros-diagnostic-msgs ros-humble-tf2-py
ros-humble-micro-ros-diagnostic-msgs-dbgsym ros-humble-tf2-py-dbgsym
ros-humble-micro-ros-msgs ros-humble-tf2-ros
ros-humble-micro-ros-msgs-dbgsym ros-humble-tf2-ros-dbgsym
ros-humble-microstrain-inertial-driver ros-humble-tf2-ros-py
ros-humble-microstrain-inertial-driver-dbgsym ros-humble-tf2-sensor-msgs
ros-humble-microstrain-inertial-examples ros-humble-tf2-tools
ros-humble-microstrain-inertial-examples-dbgsym ros-humble-tf-transformations
ros-humble-microstrain-inertial-msgs ros-humble-theora-image-transport
ros-humble-microstrain-inertial-msgs-dbgsym ros-humble-theora-image-transport-dbgsym
ros-humble-microstrain-inertial-rqt ros-humble-tinyxml2-vendor
ros-humble-mimick-vendor ros-humble-tinyxml-vendor
ros-humble-mouse-teleop ros-humble-tlsf
ros-humble-moveit-msgs ros-humble-tlsf-cpp
ros-humble-moveit-msgs-dbgsym ros-humble-tlsf-cpp-dbgsym
ros-humble-moveit-resources ros-humble-topic-monitor
ros-humble-moveit-resources-fanuc-description ros-humble-topic-statistics-demo
ros-humble-moveit-resources-fanuc-moveit-config ros-humble-topic-statistics-demo-dbgsym
ros-humble-moveit-resources-panda-description ros-humble-topic-tools
ros-humble-moveit-resources-panda-moveit-config ros-humble-topic-tools-dbgsym
ros-humble-moveit-resources-pr2-description ros-humble-topic-tools-interfaces
ros-humble-mrpt2 ros-humble-topic-tools-interfaces-dbgsym
ros-humble-mrpt2-dbgsym ros-humble-tracetools
ros-humble-mrpt-msgs ros-humble-tracetools-acceleration
ros-humble-mrpt-msgs-dbgsym ros-humble-tracetools-acceleration-dbgsym
ros-humble-mrt-cmake-modules ros-humble-tracetools-analysis
ros-humble-nao-button-sim ros-humble-tracetools-dbgsym
ros-humble-nao-command-msgs ros-humble-tracetools-launch
ros-humble-nao-command-msgs-dbgsym ros-humble-tracetools-read
ros-humble-nao-lola ros-humble-tracetools-test
ros-humble-nao-lola-dbgsym ros-humble-tracetools-trace
ros-humble-nao-sensor-msgs ros-humble-trajectory-msgs
ros-humble-nao-sensor-msgs-dbgsym ros-humble-trajectory-msgs-dbgsym
ros-humble-nav-msgs ros-humble-transmission-interface
ros-humble-nav-msgs-dbgsym ros-humble-transmission-interface-dbgsym
ros-humble-neo-simulation2 ros-humble-turtlebot3-fake-node
ros-humble-nmea-msgs ros-humble-turtlebot3-fake-node-dbgsym
ros-humble-nmea-msgs-dbgsym ros-humble-turtlebot3-msgs
ros-humble-nodl-python ros-humble-turtlebot3-msgs-dbgsym
ros-humble-nodl-to-policy ros-humble-turtlesim
ros-humble-novatel-gps-msgs ros-humble-turtlesim-dbgsym
ros-humble-novatel-gps-msgs-dbgsym ros-humble-turtle-tf2-cpp
ros-humble-ntpd-driver ros-humble-turtle-tf2-cpp-dbgsym
ros-humble-ntpd-driver-dbgsym ros-humble-turtle-tf2-py
ros-humble-ntrip-client ros-humble-twist-mux
ros-humble-object-recognition-msgs ros-humble-twist-mux-dbgsym
ros-humble-object-recognition-msgs-dbgsym ros-humble-ublox
ros-humble-octomap ros-humble-ublox-gps
ros-humble-octomap-dbgsym ros-humble-ublox-gps-dbgsym
ros-humble-octomap-msgs ros-humble-ublox-msgs
ros-humble-octomap-msgs-dbgsym ros-humble-ublox-msgs-dbgsym
ros-humble-octomap-rviz-plugins ros-humble-ublox-serialization
ros-humble-octomap-rviz-plugins-dbgsym ros-humble-udp-driver
ros-humble-octovis ros-humble-udp-driver-dbgsym
ros-humble-octovis-dbgsym ros-humble-udp-msgs
ros-humble-ompl ros-humble-udp-msgs-dbgsym
ros-humble-ompl-dbgsym ros-humble-uncrustify-vendor
ros-humble-orocos-kdl ros-humble-unique-identifier-msgs
ros-humble-orocos-kdl-dbgsym ros-humble-unique-identifier-msgs-dbgsym
ros-humble-orocos-kdl-vendor ros-humble-ur-client-library
ros-humble-osqp-vendor ros-humble-ur-client-library-dbgsym
ros-humble-osqp-vendor-dbgsym ros-humble-ur-description
ros-humble-osrf-pycommon ros-humble-urdf
ros-humble-osrf-testing-tools-cpp ros-humble-urdf-dbgsym
ros-humble-osrf-testing-tools-cpp-dbgsym ros-humble-urdfdom
ros-humble-ouster-msgs ros-humble-urdfdom-dbgsym
ros-humble-ouster-msgs-dbgsym ros-humble-urdfdom-headers
ros-humble-ouxt-common ros-humble-urdfdom-py
ros-humble-ouxt-lint-common ros-humble-urdf-parser-plugin
ros-humble-pcl-conversions ros-humble-urdf-tutorial
ros-humble-pcl-msgs ros-humble-urg-c
ros-humble-pcl-msgs-dbgsym ros-humble-urg-c-dbgsym
ros-humble-pcl-ros ros-humble-urg-node
ros-humble-pendulum-control ros-humble-urg-node-dbgsym
ros-humble-pendulum-control-dbgsym ros-humble-urg-node-msgs
ros-humble-pendulum-msgs ros-humble-urg-node-msgs-dbgsym
ros-humble-pendulum-msgs-dbgsym ros-humble-ur-msgs
ros-humble-perception-pcl ros-humble-ur-msgs-dbgsym
ros-humble-performance-test-fixture ros-humble-usb-cam
ros-humble-performance-test-fixture-dbgsym ros-humble-usb-cam-dbgsym
ros-humble-phidgets-accelerometer ros-humble-v4l2-camera
ros-humble-phidgets-accelerometer-dbgsym ros-humble-v4l2-camera-dbgsym
ros-humble-phidgets-analog-inputs ros-humble-velocity-controllers
ros-humble-phidgets-analog-inputs-dbgsym ros-humble-velocity-controllers-dbgsym
ros-humble-phidgets-api ros-humble-vision-msgs
ros-humble-phidgets-api-dbgsym ros-humble-vision-msgs-dbgsym
ros-humble-phidgets-digital-inputs ros-humble-vision-opencv
ros-humble-phidgets-digital-inputs-dbgsym ros-humble-visp
ros-humble-phidgets-digital-outputs ros-humble-visp-dbgsym
ros-humble-phidgets-digital-outputs-dbgsym ros-humble-visualization-msgs
ros-humble-phidgets-drivers ros-humble-visualization-msgs-dbgsym
ros-humble-phidgets-gyroscope ros-humble-vitis-common
ros-humble-phidgets-gyroscope-dbgsym ros-humble-warehouse-ros
ros-humble-phidgets-high-speed-encoder ros-humble-warehouse-ros-dbgsym
ros-humble-phidgets-high-speed-encoder-dbgsym ros-humble-wiimote
ros-humble-phidgets-ik ros-humble-wiimote-dbgsym
ros-humble-phidgets-magnetometer ros-humble-wiimote-msgs
ros-humble-phidgets-magnetometer-dbgsym ros-humble-wiimote-msgs-dbgsym
ros-humble-phidgets-motors ros-humble-xacro
ros-humble-phidgets-motors-dbgsym ros-humble-yaml-cpp-vendor
ros-humble-phidgets-msgs ros-humble-zbar-ros
ros-humble-phidgets-msgs-dbgsym ros-humble-zbar-ros-dbgsym
ros-humble-phidgets-spatial ros-humble-zenoh-bridge-dds
ros-humble-phidgets-spatial-dbgsym ros-humble-zenoh-bridge-dds-dbgsym
ros-humble-phidgets-temperature ros-humble-zstd-vendor
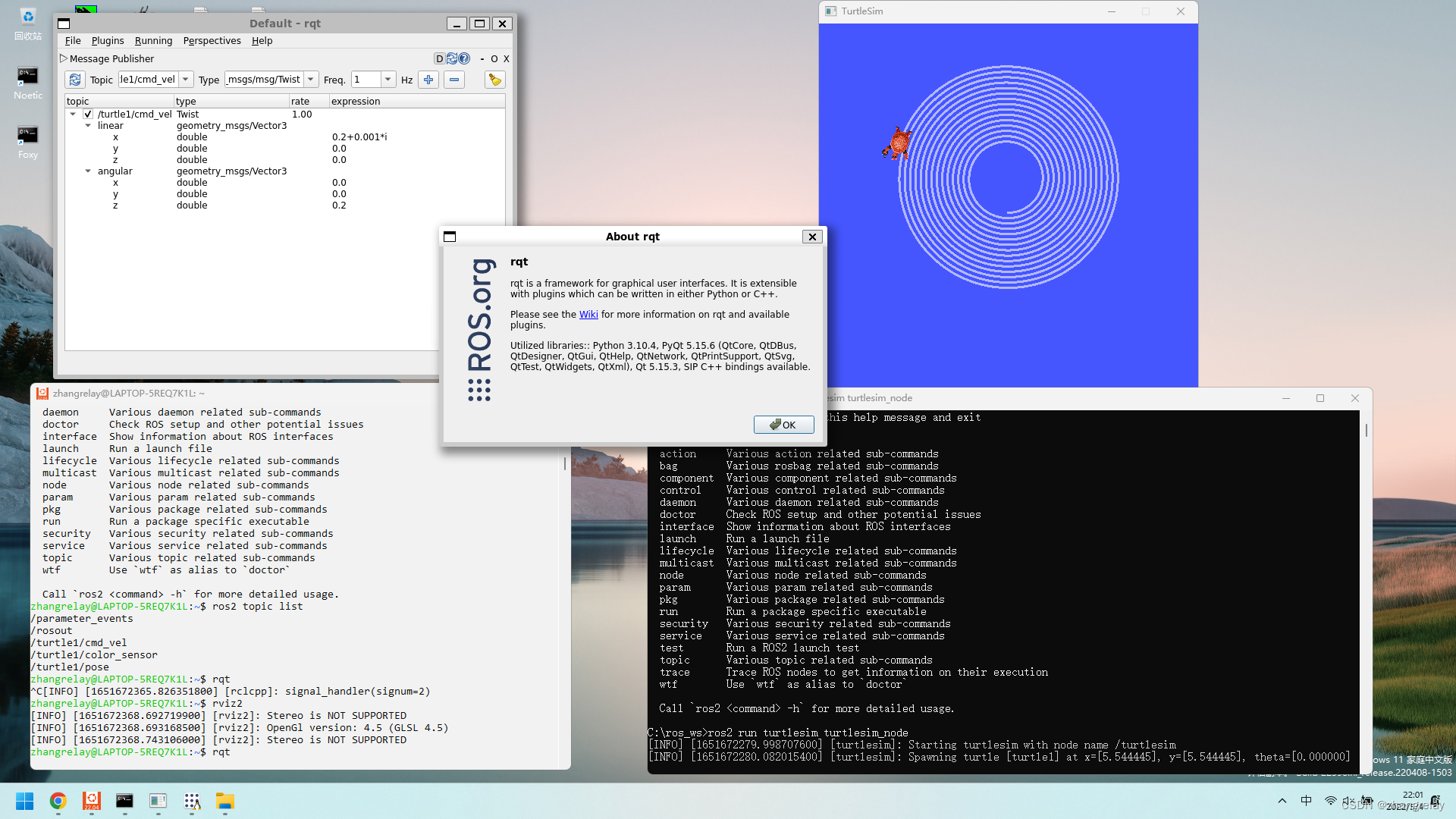
ros-humble-phidgets-temperature-dbgsym ros-humble-zstd-vendor-dbgsym测试在Win11的WSL2中均可以流畅运行。

win11中ros2和ubuntu中ros2互通效果不错。
智能推荐
linux里面ping www.baidu.com ping不通的问题_linux桥接ping不通baidu-程序员宅基地
文章浏览阅读3.2w次,点赞16次,收藏90次。对于这个问题我也是从网上找了很久,终于解决了这个问题。首先遇到这个问题,应该确认虚拟机能不能正常的上网,就需要ping 网关,如果能ping通说明能正常上网,不过首先要用命令route -n来查看自己的网关,如下图:第一行就是默认网关。现在用命令ping 192.168.1.1来看一下结果:然后可以看一下电脑上面百度的ip是多少可以在linux里面ping 这个IP,结果如下:..._linux桥接ping不通baidu
android 横幅弹出权限,有关 android studio notification 横幅弹出的功能没有反应-程序员宅基地
文章浏览阅读512次。小妹在这里已经卡了2-3天了,研究了很多人的文章,除了低版本api 17有成功外,其他的不是channel null 就是没反应 (channel null已解决)拜托各位大大,帮小妹一下,以下是我的程式跟 gradle, 我在这里卡好久又没有人可问(哭)public class MainActivity extends AppCompatActivit..._android 权限申请弹窗 横屏
CNN中padding参数分类_cnn “相同填充”(same padding)-程序员宅基地
文章浏览阅读1.4k次,点赞4次,收藏6次。valid padding(有效填充):完全不使用填充。half/same padding(半填充/相同填充):保证输入和输出的feature map尺寸相同。full padding(全填充):在卷积操作过程中,每个像素在每个方向上被访问的次数相同。arbitrary padding(任意填充):人为设定填充。..._cnn “相同填充”(same padding)
Maven的基础知识,java技术栈-程序员宅基地
文章浏览阅读790次,点赞29次,收藏28次。手绘了下图所示的kafka知识大纲流程图(xmind文件不能上传,导出图片展现),但都可提供源文件给每位爱学习的朋友一个人可以走的很快,但一群人才能走的更远。不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎扫码加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长![外链图片转存中…(img-Qpoc4gOu-1712656009273)][外链图片转存中…(img-bSWbNeGN-1712656009274)]
getFullYear()和getYear()有什么区别_getyear和getfullyear-程序员宅基地
文章浏览阅读469次。Date对象取得年份有getYear和getFullYear两种方法经 测试var d=new Date;alert(d.getYear())在IE中返回 2009,在Firefox中会返回109。经查询手册,getYear在Firefox下返回的是距1900年1月1日的年份,这是一个过时而不被推荐的方法。而alert(d.getFullYear())在IE和FF中都会返回2009。因此,无论何时都应使用getFullYear来替代getYear方法。例如:2016年用 getFullYea_getyear和getfullyear
Unix传奇 (上篇)_unix传奇pdf-程序员宅基地
文章浏览阅读182次。Unix传奇(上篇) 陈皓 了解过去,我们才能知其然,更知所以然。总结过去,我们才会知道我们明天该如何去规划,该如何去走。在时间的滚轮中,许许多的东西就像流星一样一闪而逝,而有些东西却能经受着时间的考验散发着经久的魅力,让人津津乐道,流传至今。要知道明天怎么去选择,怎么去做,不是盲目地跟从今天各种各样琳琅满目前沿技术,而应该是去 —— 认认真真地了解和回顾历史。 Unix是目前还在存活的操作系_unix传奇pdf
随便推点
ACwing 哈希算法入门:_ac算法 哈希-程序员宅基地
文章浏览阅读308次。哈希算法:将字符串映射为数字形式,十分巧妙,一般运用为进制数,进制据前人经验,一般为131,1331时重复率很低,由于字符串的数字和会很大,所以一般为了方便,一般定义为unsigned long long,爆掉时,即为对 2^64 取模,可以对于任意子序列的值进行映射为数字进而进行判断入门题目链接:AC代码:#include<bits/stdc++.h>using na..._ac算法 哈希
VS配置Qt和MySQL_在vs中 如何装qt5sqlmysql模块-程序员宅基地
文章浏览阅读952次,点赞13次,收藏27次。由于觉得Qt的编辑界面比较丑,所以想用vs2022的编辑器写Qt加MySQL的项目。_在vs中 如何装qt5sqlmysql模块
【渝粤题库】广东开放大学 互联网营销 形成性考核_画中画广告之所以能有较高的点击率,主要由于它具有以下特点-程序员宅基地
文章浏览阅读1k次。选择题题目:下面的哪个调研内容属于经济环境调研?()题目:()的目的就是加强与客户的沟通,它是是网络媒体也是网络营销的最重要特性。题目:4Ps策略中4P是指产品、价格、顾客和促销。题目:网络市场调研是目前最为先进的市场调研手段,没有任何的缺点或不足之处。题目:市场定位的基本参数有题目:市场需求调研可以掌握()等信息。题目:在开展企业网站建设时应做好以下哪几个工作。()题目:对企业网站首页的优化中,一定要注意下面哪几个方面的优化。()题目:()的主要作用是增进顾客关系,提供顾客服务,提升企业_画中画广告之所以能有较高的点击率,主要由于它具有以下特点
爬虫学习(1):urlopen库使用_urlopen the read operation timed out-程序员宅基地
文章浏览阅读1k次,点赞2次,收藏5次。以爬取CSDN为例子:第一步:导入请求库第二步:打开请求网址第三步:打印源码import urllib.requestresponse=urllib.request.urlopen("https://www.csdn.net/?spm=1011.2124.3001.5359")print(response.read().decode('utf-8'))结果大概就是这个样子:好的,继续,看看打印的是什么类型的:import urllib.requestresponse=urllib.r_urlopen the read operation timed out
分享读取各大主流邮箱通讯录(联系人)、MSN好友列表的的功能【升级版(3.0)】-程序员宅基地
文章浏览阅读304次。修正sina.com/sina.cn邮箱获取不到联系人,并精简修改了其他邮箱代码,以下就是升级版版本的介绍:完整版本,整合了包括读取邮箱通讯录、MSN好友列表的的功能,目前读取邮箱通讯录支持如下邮箱:gmail(Y)、hotmail(Y)、 live(Y)、tom(Y)、yahoo(Y)(有点慢)、 sina(Y)、163(Y)、126(Y)、yeah(Y)、sohu(Y) 读取后可以发送邮件(完..._通讯录 应用读取 邮件 的相关
云计算及虚拟化教程_云计算与虚拟化技术 教改-程序员宅基地
文章浏览阅读213次。云计算及虚拟化教程学习云计算、虚拟化和计算机网络的基本概念。此视频教程共2.0小时,中英双语字幕,画质清晰无水印,源码附件全课程英文名:Cloud Computing and Virtualization An Introduction百度网盘地址:https://pan.baidu.com/s/1lrak60XOGEqMOI6lXYf6TQ?pwd=ns0j课程介绍:https://www.aihorizon.cn/72云计算:概念、定义、云类型和服务部署模型。虚拟化的概念使用 Type-2 Hyperv_云计算与虚拟化技术 教改