给一个二值图,求出最大连通区域(可用深度优先和广度优先算法)_一张边界图,如何连通并二值化-程序员宅基地
技术标签: 面试 刷题(剑指offer)
转载自:https://www.codetd.com/article/6541194
这个问题是我在SLAM求职宝典系列D2篇中遗留的问题,因为内容较多现在单独将其列出进行解答。
本篇内容分为四个部分:
目录
(4) OpenCV中连通域的求解(C++ & Python)
(1)二值图
二值图像,顾名思义就是图像的亮度值只有两个状态:黑(0)和白(255)。二值图像在图像分析与识别中有着举足轻重的地位,因为其模式简单,对像素在空间上的关系有着极强的表现力。在实际应用中,很多图像的分析最终都转换为二值图像的分析,比如:医学图像分析、前景检测、字符识别,形状识别。二值化+数学形态学能解决很多计算机识别工程中目标提取的问题。
举个例子如下图:


二值图像分析最重要的方法就是连通区域标记,它是所有二值图像分析的基础,它通过对二值图像中白色像素(目标)的标记,让每个单独的连通区域形成一个被标识的块,进一步的我们就可以获取这些块的轮廓、外接矩形、质心、不变矩等几何参数。
(2)求最大连通区域的算法
连通区域的定义有8点法和4点法,区别在于构成像素连通关系的邻接像素位置不一样。如下图,在图像中,最小的单位是像素,每个像素周围有8个邻接像素,常见的邻接关系有2种:4邻接与8邻接。4邻接一共4个点,即上下左右。8邻接的点一共有8个,包括了对角线位置的点。
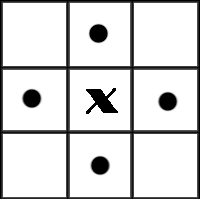
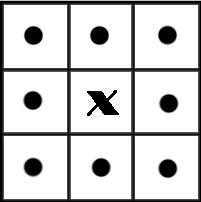
连通具有传递性,如果A与B连通,B与C连通,则A与C也连通。
下面这符图中,如果考虑4邻接,则有3个连通区域;如果考虑8邻接,则有2个连通区域。
上面我们已经介绍了二值图的概念,黑白相的灰度值分别为0和255,但实际的考察中经常会简化为了0-1图,即图像中的数字是0或1 。
从连通区域的定义可以知道,一个连通区域是由具有相同像素值的相邻像素组成像素集合,因此,我们就可以通过这两个条件在图像中寻找连通区域,对于找到的每个连通区域,我们赋予其一个唯一的标识(Label),以区别其他连通区域。
连通区域分析有基本的算法,也有其改进算法,再谈到DFS和BFS之前,我们先来看一下求连通域经典的算法,这里列举两个常见的算法: 1)Two-Pass法; 2)Seed-Filling种子填充法
两遍扫描法 ——
Two-Pass算法的步骤:
1. 第一次扫描:
访问当前像素B(x,y),如果B(x,y) == 1:
(1)如果B(x,y)的领域中像素值都为0,则赋予B(x,y)一个新的label:
label += 1, B(x,y) = label;
(2)如果B(x,y)的领域中有像素B(x, y) > 1 的像素Neighbors:
a、将Neighbors中的最小值赋予给B(x,y):
B(x,y) = min{ Neighbors }
b、记录Neighbors中各个值(label)之间的相等关系,即这些值(label)同属同一个连通区域;
labelSet[i] = { label_m, .., label_n },labelSet[i]中的所有label都属于同一个连通区域 (注:这里可以有多种实现方式,只要能够记录这些具有相等关系的label之间的关系即可)
2. 第二次扫描:
访问当前像素B(x,y),如果B(x,y) > 1:
找到与label = B(x,y)同属相等关系的一个最小label值,赋予给B(x,y);
完成扫描后,图像中具有相同label值的像素就组成了同一个连通区域。
动图展示:

种子填充法——
种子填充方法来源于计算机图形学,常用于对某个图形进行填充。思路:选取一个前景像素点作为种子,然后根据连通区域的两个基本条件(像素值相同、位置相邻)将与种子相邻的前景像素合并到同一个像素集合中,最后得到的该像素集合则为一个连通区域。
下面给出基于种子填充法的连通区域分析方法:
1. 扫描图像,直到当前像素点B(x,y) == 1:
a、将B(x,y)作为种子(像素位置),并赋予其一个label,然后将该种子相邻的所有前景像素都压入栈中;
b、弹出栈顶像素,赋予其相同的label,然后再将与该栈顶像素相邻的所有前景像素都压入栈中;
c、重复b步骤,直到栈为空;
此时,便找到了图像B中的一个连通区域,该区域内的像素值被标记为label;
2. 重复第1步,直到扫描结束;
扫描结束后,就可以得到图像B中所有的连通区域;
动图展示:
这里的算法你会发现,实际上就是深度优先搜索的原理,我在slam求职程序基础(A)篇中,有介绍过树的深度优先和广度优先遍历,从那个例子中你可以看到一般我们用栈的数据结构来实现DFS, 用队列的数据结构来实现BFS。
那么这道题中所说的需要我们分别用DFS和BFS来实现,自然是指在种子填充法的这个框架下,对于一个连通域,从第一个种子出发我们可以用DFS来找到剩下的连通像素,稍加改动同样的任务,我们也可以用BFS来实现。和树的两种遍历其实是一个道理。
(3)代码实现,以及DFS 和 BFS
下面的代码参考其他博客,整理而成,另外加入了DFS和BFS的内容, 包含了不同方法以及主程序,较长。
如果你觉得厌倦,只想学习一下DFS和BFS,强烈建议看一下我的博客-SLAM、三维视觉求职宝典 | 程序基础篇(A)中的第13问题。
#include <iostream>
#include <string>
#include <list>
#include <vector>
#include <map>
#include <stack>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace std;
using namespace cv;
//------------------------------【两步法】----------------------------------------------
// 对二值图像进行连通区域标记,从1开始标号
void Two_PassNew( const Mat &bwImg, Mat &labImg )
{
assert( bwImg.type()==CV_8UC1 );
labImg.create( bwImg.size(), CV_32SC1 ); //bwImg.convertTo( labImg, CV_32SC1 );
labImg = Scalar(0);
labImg.setTo( Scalar(1), bwImg );
assert( labImg.isContinuous() );
const int Rows = bwImg.rows - 1, Cols = bwImg.cols - 1;
int label = 1;
vector<int> labelSet;
labelSet.push_back(0);
labelSet.push_back(1);
//the first pass
int *data_prev = (int*)labImg.data; //0-th row : int* data_prev = labImg.ptr<int>(i-1);
int *data_cur = (int*)( labImg.data + labImg.step ); //1-st row : int* data_cur = labImg.ptr<int>(i);
for( int i = 1; i < Rows; i++ )
{
data_cur++;
data_prev++;
for( int j=1; j<Cols; j++, data_cur++, data_prev++ )
{
if( *data_cur!=1 )
continue;
int left = *(data_cur-1);
int up = *data_prev;
int neighborLabels[2];
int cnt = 0;
if( left>1 )
neighborLabels[cnt++] = left;
if( up > 1)
neighborLabels[cnt++] = up;
if( !cnt )
{
labelSet.push_back( ++label );
labelSet[label] = label;
*data_cur = label;
continue;
}
int smallestLabel = neighborLabels[0];
if( cnt==2 && neighborLabels[1]<smallestLabel )
smallestLabel = neighborLabels[1];
*data_cur = smallestLabel;
// 保存最小等价表
for( int k=0; k<cnt; k++ )
{
int tempLabel = neighborLabels[k];
int& oldSmallestLabel = labelSet[tempLabel]; //这里的&不是取地址符号,而是引用符号
if( oldSmallestLabel > smallestLabel )
{
labelSet[oldSmallestLabel] = smallestLabel;
oldSmallestLabel = smallestLabel;
}
else if( oldSmallestLabel<smallestLabel )
labelSet[smallestLabel] = oldSmallestLabel;
}
}
data_cur++;
data_prev++;
}
//更新等价队列表,将最小标号给重复区域
for( size_t i = 2; i < labelSet.size(); i++ )
{
int curLabel = labelSet[i];
int prelabel = labelSet[curLabel];
while( prelabel != curLabel )
{
curLabel = prelabel;
prelabel = labelSet[prelabel];
}
labelSet[i] = curLabel;
}
//second pass
data_cur = (int*)labImg.data;
for( int i = 0; i < Rows; i++ )
{
for( int j = 0; j < bwImg.cols-1; j++, data_cur++)
*data_cur = labelSet[ *data_cur ];
data_cur++;
}
}
//-------------------------------------------【种子填充法】---------------------------
void SeedFillNew(const cv::Mat& _binImg, cv::Mat& _lableImg )
{
// connected component analysis(4-component)
// use seed filling algorithm
// 1. begin with a forgeground pixel and push its forground neighbors into a stack;
// 2. pop the pop pixel on the stack and label it with the same label until the stack is empty
//
// forground pixel: _binImg(x,y)=1
// background pixel: _binImg(x,y) = 0
if(_binImg.empty() ||
_binImg.type()!=CV_8UC1)
{
return;
}
_lableImg.release();
_binImg.convertTo(_lableImg,CV_32SC1);
int label = 0; //start by 1
int rows = _binImg.rows;
int cols = _binImg.cols;
Mat mask(rows, cols, CV_8UC1);
mask.setTo(0);
int *lableptr;
for(int i=0; i < rows; i++)
{
int* data = _lableImg.ptr<int>(i);
uchar *masKptr = mask.ptr<uchar>(i);
for(int j = 0; j < cols; j++)
{
if(data[j] == 255&&mask.at<uchar>(i,j)!=1)
{
mask.at<uchar>(i,j)=1;
std::stack<std::pair<int,int>> neighborPixels;
neighborPixels.push(std::pair<int,int>(i,j)); // pixel position: <i,j>
++label; //begin with a new label
while(!neighborPixels.empty())
{
//get the top pixel on the stack and label it with the same label
std::pair<int,int> curPixel =neighborPixels.top();
int curY = curPixel.first;
int curX = curPixel.second;
_lableImg.at<int>(curY, curX) = label;
//pop the top pixel
neighborPixels.pop();
//push the 4-neighbors(foreground pixels)
if(curX-1 >= 0)
{
if(_lableImg.at<int>(curY,curX-1) == 255&&mask.at<uchar>(curY,curX-1)!=1) //leftpixel
{
neighborPixels.push(std::pair<int,int>(curY,curX-1));
mask.at<uchar>(curY,curX-1)=1;
}
}
if(curX+1 <=cols-1)
{
if(_lableImg.at<int>(curY,curX+1) == 255&&mask.at<uchar>(curY,curX+1)!=1)
// right pixel
{
neighborPixels.push(std::pair<int,int>(curY,curX+1));
mask.at<uchar>(curY,curX+1)=1;
}
}
if(curY-1 >= 0)
{
if(_lableImg.at<int>(curY-1,curX) == 255&&mask.at<uchar>(curY-1,curX)!=1)
// up pixel
{
neighborPixels.push(std::pair<int,int>(curY-1, curX));
mask.at<uchar>(curY-1,curX)=1;
}
}
if(curY+1 <= rows-1)
{
if(_lableImg.at<int>(curY+1,curX) == 255&&mask.at<uchar>(curY+1,curX)!=1)
//down pixel
{
neighborPixels.push(std::pair<int,int>(curY+1,curX));
mask.at<uchar>(curY+1,curX)=1;
}
}
}
}
}
}
}
//---------------------------------【颜色标记程序】-----------------------------------
//彩色显示
cv::Scalar GetRandomColor()
{
uchar r = 255 * (rand()/(1.0 + RAND_MAX));
uchar g = 255 * (rand()/(1.0 + RAND_MAX));
uchar b = 255 * (rand()/(1.0 + RAND_MAX));
return cv::Scalar(b,g,r);
}
void LabelColor(const cv::Mat& labelImg, cv::Mat& colorLabelImg)
{
int num = 0;
if (labelImg.empty() ||
labelImg.type() != CV_32SC1)
{
return;
}
std::map<int, cv::Scalar> colors;
int rows = labelImg.rows;
int cols = labelImg.cols;
colorLabelImg.release();
colorLabelImg.create(rows, cols, CV_8UC3);
colorLabelImg = cv::Scalar::all(0);
for (int i = 0; i < rows; i++)
{
const int* data_src = (int*)labelImg.ptr<int>(i);
uchar* data_dst = colorLabelImg.ptr<uchar>(i);
for (int j = 0; j < cols; j++)
{
int pixelValue = data_src[j];
if (pixelValue > 1)
{
if (colors.count(pixelValue) <= 0)
{
colors[pixelValue] = GetRandomColor();
num++;
}
cv::Scalar color = colors[pixelValue];
*data_dst++ = color[0];
*data_dst++ = color[1];
*data_dst++ = color[2];
}
else
{
data_dst++;
data_dst++;
data_dst++;
}
}
}
printf("color num : %d \n", num );
}
//------------------------------------------【测试主程序】--------------------------------
int main()
{
cv::Mat binImage = cv::imread("ltc2.jpg", 0);
//cv::threshold(binImage, binImage, 50, 1, CV_THRESH_BINARY);
cv::Mat labelImg;
double time;
time= getTickCount();
//对应四种方法,需要哪一种,则调用哪一种
//Two_PassOld(binImage, labelImg);
//Two_PassNew(binImage, labelImg);
//SeedFillOld(binImage, labelImg);
//SeedFillNew(binImage, labelImg);
time = 1000*((double)getTickCount() - time)/getTickFrequency();
cout<<std::fixed<<time<<"ms"<<endl;
//彩色显示
cv::Mat colorLabelImg;
LabelColor(labelImg, colorLabelImg);
cv::imshow("colorImg", colorLabelImg);
//灰度显示
cv::Mat grayImg;
labelImg *= 10;
labelImg.convertTo(grayImg, CV_8UC1);
cv::imshow("labelImg", grayImg);
double minval, maxval;
minMaxLoc(labelImg,&minval,&maxval);
cout<<"minval"<<minval<<endl;
cout<<"maxval"<<maxval<<endl;
cv::waitKey(0);
return 0;
}
想说的都写在了代码中。
问题中让我们求解最大连通域,实际上我们所完成的是找出所有的连通区域并做了标记。 所以还需要计算每个连通域的面积并找出最大值。
(4) OpenCV中连通域的求解(C++ & Python)
除了自己手动实现连通区域的求解,OpenCV中当然也自带了连通域的算法 ,这里做简单的介绍。
void DefectsDetector::LargestConnecttedComponent(Mat srcImage, Mat &dstImage)
{
Mat temp;
Mat labels;
srcImage.copyTo(temp);
//1. 标记连通域
int n_comps = connectedComponents(temp, labels, 4, CV_16U);
vector<int> histogram_of_labels;
for (int i = 0; i < n_comps; i++)//初始化labels的个数为0
{
histogram_of_labels.push_back(0);
}
int rows = labels.rows;
int cols = labels.cols;
for (int row = 0; row < rows; row++) //计算每个labels的个数
{
for (int col = 0; col < cols; col++)
{
histogram_of_labels.at(labels.at<unsigned short>(row, col)) += 1;
}
}
histogram_of_labels.at(0) = 0; //将背景的labels个数设置为0
//2. 计算最大的连通域labels索引
int maximum = 0;
int max_idx = 0;
for (int i = 0; i < n_comps; i++)
{
if (histogram_of_labels.at(i) > maximum)
{
maximum = histogram_of_labels.at(i);
max_idx = i;
}
}
//3. 将最大连通域标记为1
for (int row = 0; row < rows; row++)
{
for (int col = 0; col < cols; col++)
{
if (labels.at<unsigned short>(row, col) == max_idx)
{
labels.at<unsigned short>(row, col) = 255;
}
else
{
labels.at<unsigned short>(row, col) = 0;
}
}
}
//4. 将图像更改为CV_8U格式
labels.convertTo(dstImage, CV_8U);
}顺便学习一下, Python中opencv的用法——
主要使用了如下方法:
- 首先通过findContours函数找到二值图像中的所有边界(这块看需要调节里面的参数)
- 然后通过contourArea函数计算每个边界内的面积
- 最后通过fillConvexPoly函数将面积最大的边界内部涂成背景
import cv2
import numpy as np
import matplotlib.pyplot as plt
if __name__ == '__main__':
img = cv2.imread('bw.bmp')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#find contours of all the components and holes
gray_temp = gray.copy() #copy the gray image because function
#findContours will change the imput image into another
contours, hierarchy = cv2.findContours(gray_temp, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
#show the contours of the imput image
cv2.drawContours(img, contours, -1, (0, 255, 255), 2)
plt.figure('original image with contours'), plt.imshow(img, cmap = 'gray')
#find the max area of all the contours and fill it with 0
area = []
for i in xrange(len(contours)):
area.append(cv2.contourArea(contours[i]))
max_idx = np.argmax(area)
cv2.fillConvexPoly(gray, contours[max_idx], 0)
#show image without max connect components
plt.figure('remove max connect com'), plt.imshow(gray, cmap = 'gray')
plt.show()
本文所参考博客有:
https://blog.csdn.net/augusdi/article/details/9008921
智能推荐
postgresql 索引之 hash_load_categories_hash postgres-程序员宅基地
文章浏览阅读3.6k次。os: ubuntu 16.04postgresql: 9.6.8ip 规划192.168.56.102 node2 postgresqlhelp create indexpostgres=# \h create indexCommand: CREATE INDEXDescription: define a new indexSyntax:CREATE [ UNIQUE ..._load_categories_hash postgres
face++实现人脸识别及人脸相似度对比_face++人脸识别 html5-程序员宅基地
文章浏览阅读4.8k次。使用face++,先获取key和secret下方是人脸识别,还添加了画出人脸轮廓的正方形下方是人脸识别,还添加了画出人脸轮廓的正方形 import requests#网络访问控件 from json import JSONDecoder#互联网数据交换标准格式 import cv2 as cv#图像处理控件 http_url =&amp;amp;quot;https://a..._face++人脸识别 html5
desencrypt java md5_Java实现DES加密与解密,md5加密以及Java实现MD5加密解密类-程序员宅基地
文章浏览阅读322次。很多时候要对秘要进行持久化加密,此时的加密采用md5。采用对称加密的时候就采用DES方法了import java.io.IOException;import java.security.MessageDigest;import java.security.SecureRandom;import javax.crypto.Cipher;import javax.crypto.SecretKey;im..._java desencrypt.encrypt(pass)
BZOJ 2818 欧拉函数,线性筛_线性筛预处理质数表, 并求出欧拉函数, 预处理前缀和即可 bzoj2818boj-程序员宅基地
文章浏览阅读145次。题目链接:https://www.acwing.com/problem/content/description/222/给定整数N,求1<=x,y<=N且GCD(x,y)为素数的数对(x,y)有多少对。GCD(x,y)即求x,y的最大公约数。输入格式输入一个整数N输出格式输出一个整数,表示满足条件的数对数量。数据范围1≤N≤10^7输入样例:4..._线性筛预处理质数表, 并求出欧拉函数, 预处理前缀和即可 bzoj2818boj
使用 arm-linux-androideabi-addr2line 工具定位 libunity.so 崩溃问题-程序员宅基地
文章浏览阅读710次,点赞13次,收藏7次。它的名称有点不同 - aarch64-linux-android-addr2line。尽管该实用程序的名称不包含单词arm,但它成功地解密了arm64-v8下的堆栈跟踪,并通常感知arm64-v8的字符。是 NDK 自带的调试工具,可以用来分析 so 崩溃时输出的的内存地址。之后就是通过 cmd 进入到这个路径。找到了 64 位所需的实用程序。_arm-linux-androideabi
javaweb-邮件发送_javaweb发送邮件-程序员宅基地
javaweb-邮件发送 摘要: 本文介绍了邮件传输协议(SMTP和POP3)以及电子邮件的发送和接收过程。还讨论了纯文本文件、带图片和附件的邮件发送方法,以及通过servlet方式注册邮箱和使用springboot框架发送邮件的实现。
随便推点
Zookeeper集群部署和单机部署
【代码】Zookeeper集群部署和单机部署。
linux ipv6端口转发,linux – TCP / IPv6通过ssh隧道-程序员宅基地
文章浏览阅读871次。是的,这是可能的并且不是太困难,但解决方案非常不理想,因为SSH在TCP上运行并且具有合理的开销.服务器必须在其配置文件sshd_config中:PermitTunnel point-to-point然后,您需要在两台计算机上都是root用户.您使用以下命令连接到服务器:ssh -w any root@server连接后,使用两个系统中的命令ip link来了解在每个系统中创建的tunN设备,并在..._ljnux上ipv6转发配置
linux系统编辑神器 -vim用法大全-程序员宅基地
文章浏览阅读88次。vim编辑器文本编辑器,字处理器ASCIInano,sedvi:VisualInterfacevim:VIiMproved全屏编辑器,模式化编辑器vim模式:编辑模式(命令模式)1.输入模式2.末行模式模式转换:编辑-->输入:i:在当前光标所在字符的前面,转为输入模式;a:在当前光标所在字符的后面,转为输入模式;o:在当前光标所在行的下方,新...
计算机专业游戏本推荐,2018高性价比游戏本推荐_游戏笔记本哪个好-太平洋电脑网...-程序员宅基地
文章浏览阅读245次。【PConline海选导购】晃眼间,秋风又起,让人振奋的开学季又要到来了!虽然说没有学习压力的暑假,在家着实悠哉,但想到回校后可以跟小伙伴们一起各种开黑吃鸡,是不是就感到很兴奋呢?说到“吃鸡”这种吃配置的游戏,就不得不说游戏本了,毕竟普通的笔记本电脑很难给我们带来畅快的游戏体验。而近年来游戏本市场俨然成为了各大厂商的必争之地,而随着开学季的到来,各大厂商更是推出了众多促销活动,下面就让我们一起来看..._计应专业游戏本
codePen按钮样式学习
看到codepen里面有的按钮搞得很炫酷,但其实也不是很难,就学习记录一下。
服务器维护中没法直播游戏,我的世界盒子显示维护中如何进入战堂服务器-程序员宅基地
文章浏览阅读408次。时间:2021-08-11编辑:hxh斗罗大陆魂师对决火雨队怎么搭配?火雨队是近期非常热门的一套阵容,不少玩家想了解该阵容,那么下面就让小编给大家带来斗罗大陆魂师对决火雨队阵容推荐,感兴趣的小伙伴们一起来看看吧。时间:2021-08-11编辑:hxh玩家在巅峰演武副本中不知道怎么打秦明,秦明的盾很厚不知道怎么破?那么下面就让小编给大家带来斗罗大陆魂师对决巅峰演武秦明破盾攻略,感兴趣的小伙伴们一起来...