ROS保姆级0基础入门教程 |第一章 ROS的概述与环境搭建(4万字教程,建议收藏)-程序员宅基地
技术标签: 机器人 melodic ubuntu ROS ros sudo
目录
1 ROS简介
ROS诞生背景
机器人是一种高度复杂的系统性实现,机器人设计包含了机械加工、机械结构设计、硬件设计、嵌入式软件设计、上层软件设计…是各种硬件与软件集成,甚至可以说机器人系统是当今工业体系的集大成者。
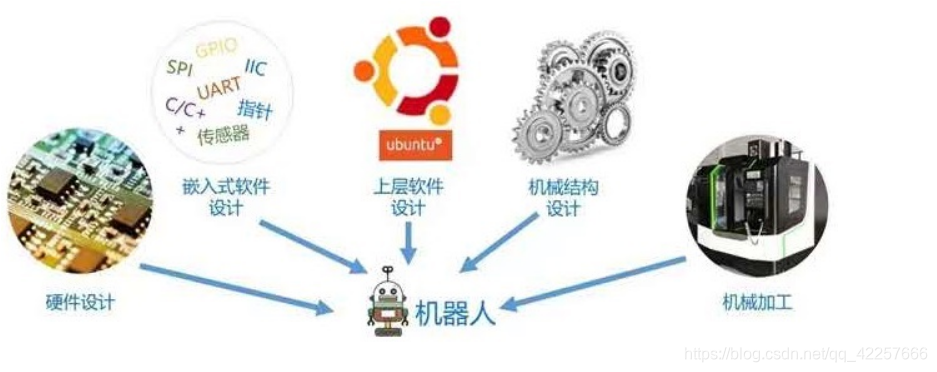
机器人体系是相当庞大的,其复杂度之高,以至于没有任何个人、组织甚至公司能够独立完成系统性的机器人研发工作。
一种更合适的策略是:让机器人研发者专注于自己擅长的领域,其他模块则直接复用相关领域更专业研发团队的实现,当然自身的研究也可以被他人继续复用。这种基于"复用"的分工协作,遵循了不重复发明轮子的原则,显然是可以大大提高机器人的研发效率的,尤其是随着机器人硬件越来越丰富,软件库越来越庞大,这种复用性和模块化开发需求也愈发强烈。
在此大背景下,于 2007 年,一家名为 柳树车库(Willow Garage) 的机器人公司发布了 ROS(机器人操作系统),ROS是一套机器人通用软件框架,可以提升功能模块的复用性,并且随着该系统的不断迭代与完善,如今 ROS 已经成为机器人领域的事实标准。

1.1 ROS概念
ROS全称Robot Operating System(机器人操作系统)
ROS是适用于机器人的开源元操作系统;
ROS集成了大量的工具,库,协议,提供类似OS所提供的功能,简化对机器人的控制;
还提供了用于在多台计算机上获取,构建,编写和运行代码的工具和库,ROS在某些方面类似于“机器人框架”;
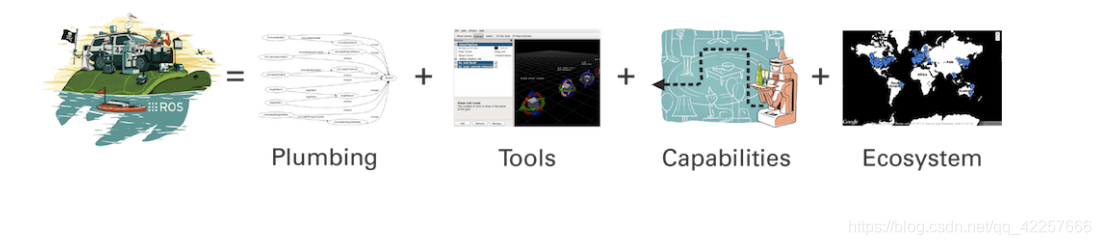
ROS设计者将ROS表述为“ROS = Plumbing + Tools + Capabilities + Ecosystem”,即ROS是通讯机制、工具软件包、机器人高层技能以及机器人生态系统的集合体。
1.2 ROS设计目标
机器人开发的分工思想,实现了不同研发团队间的共享和协作,提升了机器人的研发效率,为了服务“ 分工”,ROS主要设计了如下目标:
- 复用:ROS的目标不是成为具有最多功能的框架,ROS的主要目标是支持机器人技术研发中的代码重用。
- 分布式:ROS是进程(也称为Nodes)的分布式框架,ROS中的进程可分布于不同主机,不同主机协同工作,从而分散计算压力
- 松耦合:ROS中功能模块封装于独立的功能包或元功能包,便于分享,功能包内的模块以节点为单位运行,以ROS标准的IO作为接口,开发者不需要关注模块内部实现,只要了解接口规则就能实现复用,实现了模块间点对点的松耦合连接
- 精简:ROS被设计为尽可能精简,以便为ROS编写的代码可以与其他机器人软件框架一起使用。ROS易于与其他机器人软件框架集成:ROS已与OpenRAVE,Orocos和Player集成。
- 语言独立性:包括Java,C++,Python等。为了支持更多应用开发和移植,ROS设计为一种语言弱相关的框架结构,使用简洁,中立的定义语言描述模块间的消息接口,在编译中再产生所使用语言的目标文件,为消息交互提供支持,同时允许消息接口的嵌套使用
- 易于测试:ROS具有称为rostest的内置单元/集成测试框架,可轻松安装和拆卸测试工具。
- 大型应用:ROS适用于大型运行时系统和大型开发流程。
- 丰富的组件化工具包:ROS可采用组件化方式集成一些工具和软件到系统中并作为一个组件直接使用,如RVIZ(3D可视化工具),开发者根据ROS定义的接口在其中显示机器人模型等,组件还包括仿真环境和消息查看工具等
- 免费且开源:开发者众多,功能包多
1.3 ROS发展历程
ROS是一个由来已久、贡献者众多的大型软件项目。在ROS诞生之前,很多学者认为,机器人研究需要一个开放式的协作框架,并且已经有不少类似的项目致力于实现这样的框架。在这些工作中,斯坦福大学在2000年年中开展了一系列相关研究项目,如斯坦福人工智能机器人(STandford AI Robot, STAIR)项目、个人机器人(Personal Robots, PR)项目等,在上述项目中,在研究具有代表性、集成式人工智能系统的过程中,创立了用于室内场景的高灵活性、动态软件系统,其可以用于机器人学研究。
2007年,柳树车库(Willow Garage)提供了大量资源,用于将斯坦福大学机器人项目中的软件系统进行扩展与完善,同时,在无数研究人员的共同努力下,ROS的核心思想和基本软件包逐渐得到完善。
ROS的发行版本(ROS distribution) 指ROS软件包的版本,其与Linux的发行版本(如Ubuntu)的概念类似。推出ROS发行版本的目的在于使开发人员可以使用相对稳定的代码库,直到其准备好将所有内容进行版本升级为止。因此,每个发行版本推出后,ROS开发者通常仅对这一版本的bug进行修复,同时提供少量针对核心软件包的改进。
版本特点: 按照英文字母顺序命名,ROS 目前已经发布了ROS1 的终极版本: noetic,并建议后期过渡至 ROS2 版本。noetic 版本之前默认使用的是 Python2,noetic 支持 Python3。
建议版本: noetic 或 melodic 或 kinetic

2 ROS安装
我使用的是 ROS 版本是 Melodic,那么可以在 ubuntu18.04、Mac 或 windows10 系统上安装,虽然一般用户平时使用的操作系统以windows居多,但是ROS之前的版本基本都不支持windows,所以当前我们选用的操作系统是 ubuntu,以方便向历史版本过渡。ubuntu安装常用方式有两种:
-
实体机安装 ubuntu (较为常用的是使用双系统,windows 与 ubuntu 并存);
-
虚拟机安装 ubuntu。
两种方式比较,各有优缺点:
- 方案1可以保证性能,且不需要考虑硬件兼容性问题,但是和windows系统交互不便;
- 方案2可以方便的实现 windows 与 ubuntu 交互,不过性能稍差,且与硬件交互不便。
在 ROS 中,一些仿真操作是比较耗费系统资源的,且经常需要和一些硬件(雷达、摄像头、imu、STM32、arduino…)交互,因此,原则上建议采用方案1,不过如果只是出于学习目的,那么方案2也基本够用,且方案2在windows与ubuntu的交互上更为方便,对于学习者更为友好。当然,具体采用哪种实现方案,请按需选择。我选择的是安装双系统。
如果采用虚拟机安装 ubuntu,再安装 ROS 的话,大致流程如下:
安装虚拟机软件(比如:virtualbox 或 VMware);
使用虚拟机软件虚拟一台主机;
在虚拟主机上安装 ubuntu 18.04;
在 ubuntu 上安装 ROS;
测试 ROS 环境是否可以正常运行。
虚拟机软件选择上,对于我们学习而言 virtualbox 和 VMware 都可以满足需求,二者比较,前者免费,后者收费,所以尽量选用 virtualbox。
2.1安装ubuntu
对应于ROS melodic版本,我们需要安装的是ubuntu18.04,具体安装教程网上有很多,建议选择访问量最高的那个。还有,不管是虚拟机还是双系统,ubuntu18.04的镜像文件一定要选好,这个影响到后面很多东西,有的镜像文件缺少东西,会出各种错误,什么都需要自己手动配置,为了减少不必要的麻烦,还是选择权威些的镜像文件。
2.2 安装 ROS
Ubuntu 安装完毕后,就可以安装 ROS 操作系统了,大致步骤如下:
- 配置ubuntu的软件和更新;
- 设置安装源;
- 设置key;
- 安装;
- 配置环境变量。
1.配置ubuntu的软件和更新
配置ubuntu的软件和更新,允许安装不经认证的软件。
首先打开“软件和更新”对话框,具体可以在 Ubuntu 搜索按钮中搜索。
打开后按照下图进行配置(确保勾选了"restricted", “universe,” 和 “multiverse.”)

2.设置安装源
官方默认安装源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
或来自国内清华的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
或来自国内中科大的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
PS: 回车后,可能需要输入管理员密码;建议使用国内资源,安装速度更快。
3.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
4.安装
首先需要更新 apt(以前是 apt-get, 官方建议使用 apt 而非 apt-get),apt 是用于从互联网仓库搜索、安装、升级、卸载软件或操作系统的工具。
sudo apt update
等待…
然后,再安装所需类型的 ROS:ROS 多个类型:Desktop-Full、Desktop、ROS-Base。这里介绍较为常用的Desktop-Full(官方推荐)安装: ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators, navigation and 2D/3D perception
sudo apt install ros-melodic-desktop-full
等待…(比较耗时)
友情提示: 由于网络原因,导致连接超时,可能会安装失败,如下所示:
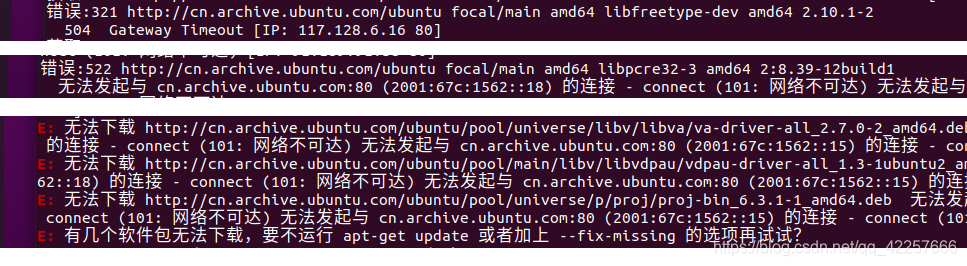
可以多次重复调用 更新 和 安装命令,直至成功。
5.环境设置
配置环境变量,方便在任意 终端中使用 ROS。
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.安装构建依赖
首先安装构建依赖的相关工具
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
然后安装rosdep(可以安装系统依赖)
sudo apt install python-rosdep
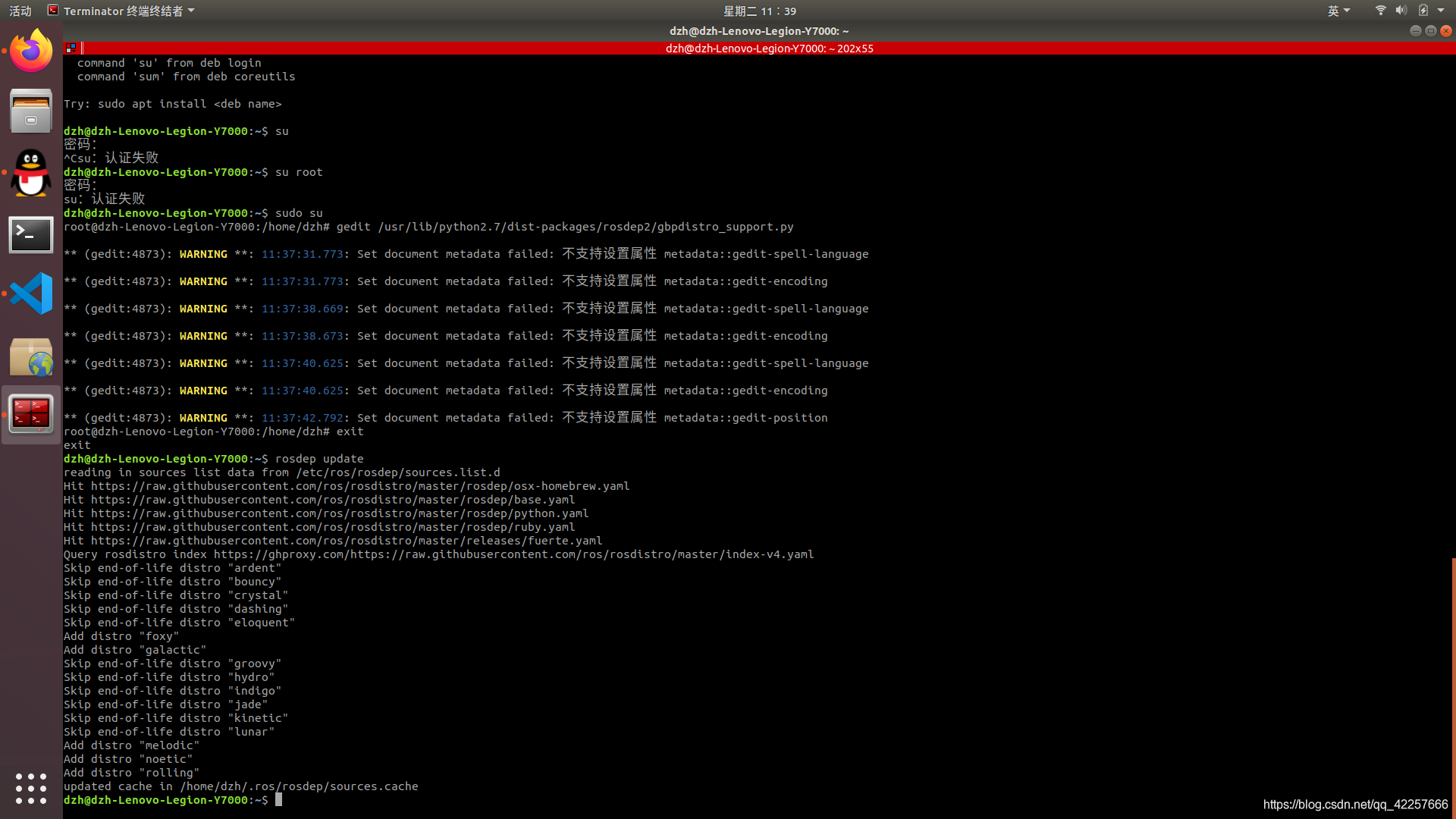
初始化rosdep
sudo rosdep init
rosdep update
当执行到最后 sudo rosdep init 和rosdep时,绝大多数人都会抛出异常。因为境外资源被屏蔽,而且墙在今年4月份时候还被加高了,所以翻墙也很困难了。
这里给出解决方法:rosdep报错最有效方法
我参考这篇博客成功rosdep update!
卸载
如果需要卸载ROS可以调用如下命令:
sudo apt remove ros-melodic-*
另请参考:ROS wiki
2.3 测试 ROS
ROS 内置了一些小程序,可以通过运行这些小程序以检测 ROS 环境是否可以正常运行
- 首先启动三个命令行(ctrl + alt + T)
- 命令行1键入:roscore
- 命令行2键入:rosrun turtlesim turtlesim_node(此时会弹出图形化界面)
- 命令行3键入:rosrun turtlesim turtle_teleop_key(在3中可以通过上下左右控制2中乌龟的运动)
最终结果如下所示:
智能推荐
linux里面ping www.baidu.com ping不通的问题_linux桥接ping不通baidu-程序员宅基地
文章浏览阅读3.2w次,点赞16次,收藏90次。对于这个问题我也是从网上找了很久,终于解决了这个问题。首先遇到这个问题,应该确认虚拟机能不能正常的上网,就需要ping 网关,如果能ping通说明能正常上网,不过首先要用命令route -n来查看自己的网关,如下图:第一行就是默认网关。现在用命令ping 192.168.1.1来看一下结果:然后可以看一下电脑上面百度的ip是多少可以在linux里面ping 这个IP,结果如下:..._linux桥接ping不通baidu
android 横幅弹出权限,有关 android studio notification 横幅弹出的功能没有反应-程序员宅基地
文章浏览阅读512次。小妹在这里已经卡了2-3天了,研究了很多人的文章,除了低版本api 17有成功外,其他的不是channel null 就是没反应 (channel null已解决)拜托各位大大,帮小妹一下,以下是我的程式跟 gradle, 我在这里卡好久又没有人可问(哭)public class MainActivity extends AppCompatActivit..._android 权限申请弹窗 横屏
CNN中padding参数分类_cnn “相同填充”(same padding)-程序员宅基地
文章浏览阅读1.4k次,点赞4次,收藏6次。valid padding(有效填充):完全不使用填充。half/same padding(半填充/相同填充):保证输入和输出的feature map尺寸相同。full padding(全填充):在卷积操作过程中,每个像素在每个方向上被访问的次数相同。arbitrary padding(任意填充):人为设定填充。..._cnn “相同填充”(same padding)
Maven的基础知识,java技术栈-程序员宅基地
文章浏览阅读790次,点赞29次,收藏28次。手绘了下图所示的kafka知识大纲流程图(xmind文件不能上传,导出图片展现),但都可提供源文件给每位爱学习的朋友一个人可以走的很快,但一群人才能走的更远。不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎扫码加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长![外链图片转存中…(img-Qpoc4gOu-1712656009273)][外链图片转存中…(img-bSWbNeGN-1712656009274)]
getFullYear()和getYear()有什么区别_getyear和getfullyear-程序员宅基地
文章浏览阅读469次。Date对象取得年份有getYear和getFullYear两种方法经 测试var d=new Date;alert(d.getYear())在IE中返回 2009,在Firefox中会返回109。经查询手册,getYear在Firefox下返回的是距1900年1月1日的年份,这是一个过时而不被推荐的方法。而alert(d.getFullYear())在IE和FF中都会返回2009。因此,无论何时都应使用getFullYear来替代getYear方法。例如:2016年用 getFullYea_getyear和getfullyear
Unix传奇 (上篇)_unix传奇pdf-程序员宅基地
文章浏览阅读182次。Unix传奇(上篇) 陈皓 了解过去,我们才能知其然,更知所以然。总结过去,我们才会知道我们明天该如何去规划,该如何去走。在时间的滚轮中,许许多的东西就像流星一样一闪而逝,而有些东西却能经受着时间的考验散发着经久的魅力,让人津津乐道,流传至今。要知道明天怎么去选择,怎么去做,不是盲目地跟从今天各种各样琳琅满目前沿技术,而应该是去 —— 认认真真地了解和回顾历史。 Unix是目前还在存活的操作系_unix传奇pdf
随便推点
ACwing 哈希算法入门:_ac算法 哈希-程序员宅基地
文章浏览阅读308次。哈希算法:将字符串映射为数字形式,十分巧妙,一般运用为进制数,进制据前人经验,一般为131,1331时重复率很低,由于字符串的数字和会很大,所以一般为了方便,一般定义为unsigned long long,爆掉时,即为对 2^64 取模,可以对于任意子序列的值进行映射为数字进而进行判断入门题目链接:AC代码:#include<bits/stdc++.h>using na..._ac算法 哈希
VS配置Qt和MySQL_在vs中 如何装qt5sqlmysql模块-程序员宅基地
文章浏览阅读952次,点赞13次,收藏27次。由于觉得Qt的编辑界面比较丑,所以想用vs2022的编辑器写Qt加MySQL的项目。_在vs中 如何装qt5sqlmysql模块
【渝粤题库】广东开放大学 互联网营销 形成性考核_画中画广告之所以能有较高的点击率,主要由于它具有以下特点-程序员宅基地
文章浏览阅读1k次。选择题题目:下面的哪个调研内容属于经济环境调研?()题目:()的目的就是加强与客户的沟通,它是是网络媒体也是网络营销的最重要特性。题目:4Ps策略中4P是指产品、价格、顾客和促销。题目:网络市场调研是目前最为先进的市场调研手段,没有任何的缺点或不足之处。题目:市场定位的基本参数有题目:市场需求调研可以掌握()等信息。题目:在开展企业网站建设时应做好以下哪几个工作。()题目:对企业网站首页的优化中,一定要注意下面哪几个方面的优化。()题目:()的主要作用是增进顾客关系,提供顾客服务,提升企业_画中画广告之所以能有较高的点击率,主要由于它具有以下特点
爬虫学习(1):urlopen库使用_urlopen the read operation timed out-程序员宅基地
文章浏览阅读1k次,点赞2次,收藏5次。以爬取CSDN为例子:第一步:导入请求库第二步:打开请求网址第三步:打印源码import urllib.requestresponse=urllib.request.urlopen("https://www.csdn.net/?spm=1011.2124.3001.5359")print(response.read().decode('utf-8'))结果大概就是这个样子:好的,继续,看看打印的是什么类型的:import urllib.requestresponse=urllib.r_urlopen the read operation timed out
分享读取各大主流邮箱通讯录(联系人)、MSN好友列表的的功能【升级版(3.0)】-程序员宅基地
文章浏览阅读304次。修正sina.com/sina.cn邮箱获取不到联系人,并精简修改了其他邮箱代码,以下就是升级版版本的介绍:完整版本,整合了包括读取邮箱通讯录、MSN好友列表的的功能,目前读取邮箱通讯录支持如下邮箱:gmail(Y)、hotmail(Y)、 live(Y)、tom(Y)、yahoo(Y)(有点慢)、 sina(Y)、163(Y)、126(Y)、yeah(Y)、sohu(Y) 读取后可以发送邮件(完..._通讯录 应用读取 邮件 的相关
云计算及虚拟化教程_云计算与虚拟化技术 教改-程序员宅基地
文章浏览阅读213次。云计算及虚拟化教程学习云计算、虚拟化和计算机网络的基本概念。此视频教程共2.0小时,中英双语字幕,画质清晰无水印,源码附件全课程英文名:Cloud Computing and Virtualization An Introduction百度网盘地址:https://pan.baidu.com/s/1lrak60XOGEqMOI6lXYf6TQ?pwd=ns0j课程介绍:https://www.aihorizon.cn/72云计算:概念、定义、云类型和服务部署模型。虚拟化的概念使用 Type-2 Hyperv_云计算与虚拟化技术 教改