Un*、Id分别突变情况下单闭环直流调速系统仿真_怎样将有静差仿真图改为无静差-程序员宅基地
技术标签: matlab simulink 直流电机调速MATLAB SIMULINK仿真
1 有静差的比例调速系统的理论分析
首先分析有静差的比例调速系统,图1所示是具有转速负反馈的直流比例调速系统,被调量是转速n,给定量是转速给定电压Un*,在电动机轴上安装测速发电机TG (Tachometer Generator)用以得到与被测转速成正比的反馈电压Un。Un*与Un相比较后,得转速偏差电压△U,经过比例放大器A,产生电力电子变换器UPE所需的控制电压Uc,UPE是相控整流器或者PWM变换器。在调速系统中,比例放大器又称作比例(P)调节器。从Uc开始一直到直流电动机,系统的结构与开环调速系统相同,而闭环控制系统和开环控制系统的主要差别就在于转速n经过测量反馈到输入端参与控制。

图1 带转速负反馈的闭环直流比例调速系统原理框图
Fig.1 Schematic of the closed-loop DC proportional speed control system with negative speed feedback
他励直流电动机以磁场为媒介,实现电能到机械能的转换,其动态数学模型包括电压平衡方程和机械运动方程。其在额定励磁下的等效电路如图2所示,其中电枢回路总电阻R和电感L包含电力电子变换器内阻、电枢电阻和电感以及可能在主电路中接人的其他电阻和电感,规定的正方向如图2所示。

图2 他励直流电动机在额定励磁下的等效电路
Fig.2 His recitation DC motor is an equivalent circuit under rated excitation
分析该电路的动态电压方程、电动机轴上的动力学方程,得到该电路的动态结构图如图3所示。

图3 额定励磁下直流电动机的动态结构框图
Fig.3 Dynamic structure block diagram of a DC motor rated for excitation
由图3可以看出,直流电动机有两个输入量,一个是施加在电枢上的理想空载电压Un,另一个是负载电流Id。前者是控制输人量,后者是扰动输人量。如果不需要在结构图中显现出电流Id,可将扰动量IdL的综合点移前,再进行等效变换,得到图4。

图4 直流电动机动态结构框图的变换
Fig.4 Transformation of the dynamic structure block diagram of DC motors
在图1的转速反馈控制直流调速系统中还有比例放大器和测速反馈环节,它们的响应都可以认为是瞬时的,因此它们的传递函数就是它们的放大系数,即
放大器
![]()
测速反馈
![]()
知道了各环节的传递函数后,把它们按在系统中的相互关系组合起来,就可以画出闭环直流调速系统的动态结构框图,如图5所示。由图可见,将电力电子变换器按一阶惯性环节处理后,带比例放大器的转速反馈控制直流调速系统可以近似看作是一个三阶线性系统。

图5 转速反馈控制直流调速系统的动态结构框图
Fig.5 Dynamic structure block diagram of the DC speed control system with speed feedback control
2 无静差的比例积分调速系统的理论分析
与有静差的比例调速系统相比,无静差的比例积分调速系统只需将比例放大器换成转速调节器( Automatic Speed Regulator, ASR)即可,其他部分均与有静差的比例调速系统相同,图6所示是具有转速负反馈的直流调速比例积分系统。

图6 带转速负反馈的闭环直流比例积分调速系统原理图
Fig.6 Closed-loop DC proportional integration speed control system schematic with negative speed feedback
接下来主要介绍ASR模块部分,采用模拟控制时,可用运算放大器来实现PI调节器,其电路图如图7所示。图中所示的极性表明调节器输人Uin的极性和输出Uex。的极性是反相的; Rbal为运算放大器同相输人端的平衡电阻,一般取反相输人端各电路电阻的并联值,该电路的传递函数为:
![]()
式中,Kp为PI调节器的比例放大系数;τ为PI调节器的积分时间常数。
无静差直流调速系统的稳态结构如图7所示,图中的转速调节器采用比例积分调节器,用象征性的比例积分特性来表示。

图7无静差直流调速系统稳态结构框图
Fig.7 A block diagram of a steady-state structure without static DC speed-regulating system
3 有静差的比例调速系统实验仿真参数及其仿真结果
3.1 实验仿真参数
直流电动机:反电动势系数 Ce=0. 145 9V * min/r,允许过载倍数l =1.5; PWM变换器开关频率: 8kHz, 放大系数Ks=107.5,Ts =0.002s;电枢回路总电阻R=0.368Ω;时间常数:电枢回路电磁时间常T1 =0. 0144s,电力拖动系统机电时间常数Tm=0.18s;转速反馈系数a=0.003 83V*min/r;对应额定转速时的给定电压Un* = 10V;比例放大器的放大系数为:Kp=1。
为了实现突变输入量,我选择了两个阶跃信号输入,第一个的波形图如图8所示。横坐标为时间(s),纵坐标为输入控制量Un*(V),该输入控制量在第1秒时刻阶跃到10V。
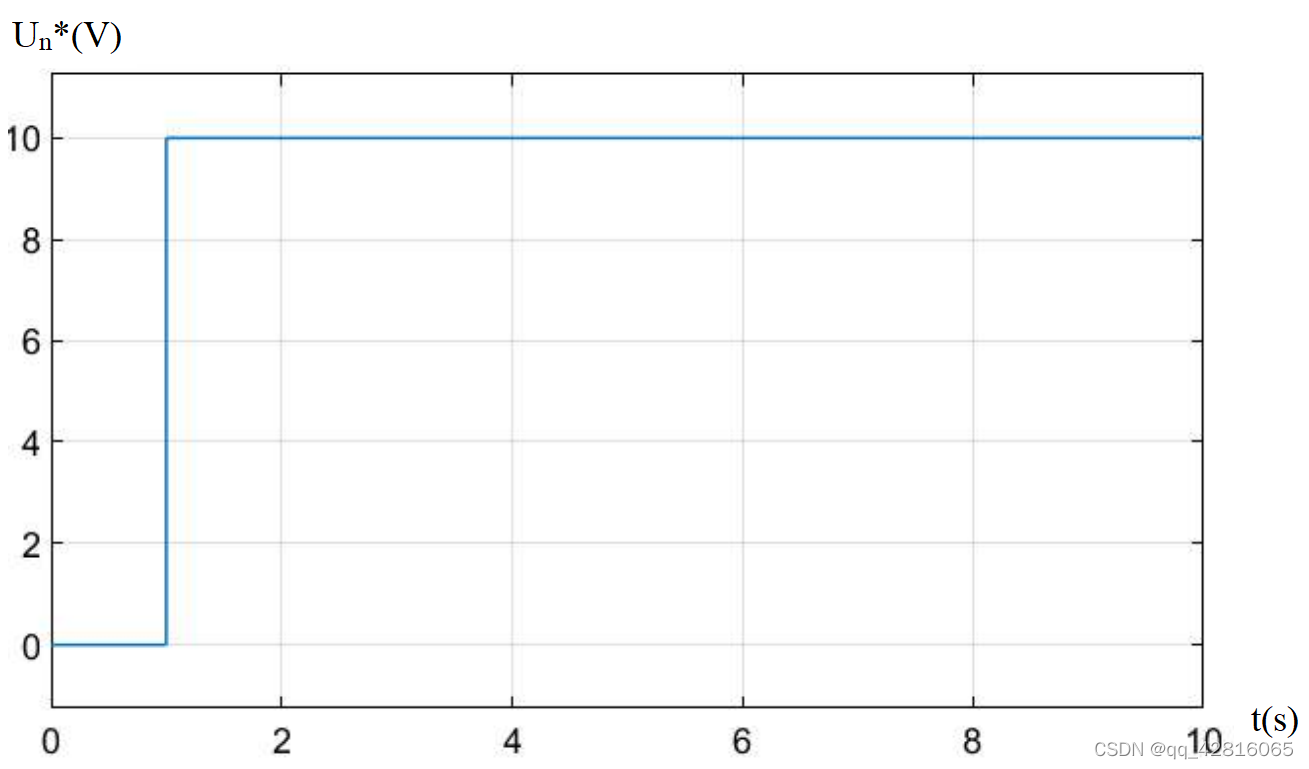
图8 一号控制输入量波形图
Fig.8 No.1 controls the input waveform chart
第二个的波形图如图9所示。横坐标为时间(s),纵坐标为输入控制量Un*(V),该输入控制量在第2秒时刻阶跃到2V。

图9二号控制输入量波形图
Fig.9 No.2 controls the input waveform chart
两个波形进行叠加得到完整的控制输入量的突变波形图如图10所示。

图10 实际控制输入量波形图
Fig.10 The actual control input waveform chart
为了实现突变负载,我采用了类似的方法选择了两个阶跃信号,第一个的电流波形图如图11所示。坐标为时间(s),纵坐标为负载电流IdL(A),该负载电流在第1秒时刻阶跃到1A。

图11 一号负载电流波形图
Fig.11 Load No. 1 current waveform
第二个的波形图如图12所示。横坐标为时间(s),纵坐标为负载电流IdL(A),该负载电流在第2秒时刻阶跃到40A。

图12 二号负载电流波形图
Fig.12 Load No. 2 current waveform
两个波形进行叠加得到完整的负载电流的突变波形图如图13所示。

图13 实际负载电流波形图
Fig.13 Actual load current waveform
3.2 实验仿真结果
3.2.1 突加控制输入量仿真实验
该实验的具体步骤如下:
1.打开MATLAB中的Simulink;
2.创建一个Blank Model;
3.然后在Library Browser中添加以下模块:Step、Add、Sum、Gain、Transfer Fcn、Scope;
4.并将所有模块进行排版连线得到图14所示的有静差的比例调速系统的仿真框图;

图14 有静差的比例调速系统的仿真框图
Fig.14 Simulation block diagram of a proportional speed control system with static difference
5.修改模块参数:
Un*1:Final Value改为10;
Un*2:Step Time改为2,Final Value改为2;
Kp1、Id1:不做修改;
Ks/(Ts*s+1)1:Numerator coefficients修改为[107.5],Denominator coefficients修改为[0.0020 1];
1/R/(T1*s+1)1:Numerator coefficients修改为[1/0.368],Denominator coefficients修改为[0.0144 1];
R/Tm*s1:Numerator coefficients修改为[0.368],Denominator coefficients修改为[0.18 0];
1/Ce1:Gain修改为1/0.1459;
a1:Gain修改为0.00383;
6.双击打开Scope,点击运行按钮,进行仿真,获得图15所示的动态过程仿真结果。

图15 突加控制输入量的动态过程仿真结果图
Fig.15 Graph of dynamic process simulation results that suddenly controls the input
3.2.2 突加负载仿真实验
该实验的具体步骤如下:
1.打开MATLAB中的Simulink;
2.创建一个Blank Model;
3.然后在Library Browser中添加以下模块:Step、Add、Sum、Gain、Transfer Fcn、Scope;
4.并将所有模块进行排版连线得到图16所示的有静差的比例调速系统的仿真框图;

图16 有静差的比例调速系统的仿真框图
Fig.16 Simulation block diagram of a proportional speed control system with static difference
5.修改模块参数:
Un*3:Final Value改为10;
Kp2、Id2:不做修改;
Ks/(Ts*s+1)2:Numerator coefficients修改为[107.5],Denominator coefficients修改为[0.0020 1];
1/R/(T1*s+1)2:Numerator coefficients修改为[1/0.368],Denominator coefficients修改为[0.0144 1];
Id3:Step time修改为2,Final value修改为10;
R/Tm*s2:Numerator coefficients修改为[0.368],Denominator coefficients修改为[0.18 0];
1/Ce2:Gain修改为1/0.1459;
a2:Gain修改为0.00383;
6.双击打开Scope,点击运行按钮,进行仿真,获得图17所示的动态过程仿真结果。
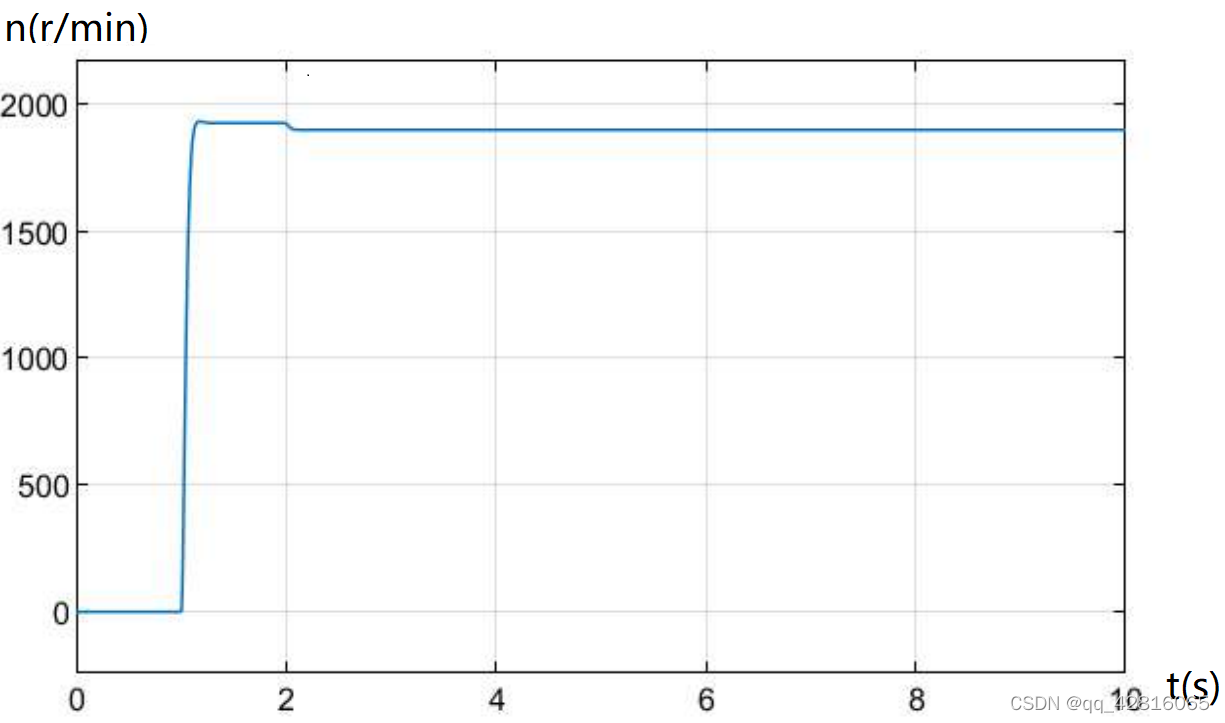
图17突加负载的动态过程仿真结果图
Fig.17 Graph of dynamic process simulation results for burst load
4 无静差的比例积分调速系统实验仿真参数及其仿真结果
4.1 实验仿真参数
直流电动机:反电动势系数 Ce=0. 145 9V * min/r,允许过载倍数l =1.5; PWM变换器开关频率: 8kHz, 放大系数Ks=107.5,Ts =0.002s;电枢回路总电阻R=0.368Ω;时间常数:电枢回路电磁时间常T1 =0. 0144s,电力拖动系统机电时间常数Tm=0.18s;转速反馈系数a=0.003 83V*min/r;对应额定转速时的给定电压Un* = 10V;比例放大器的放大系数为:Kp=1;比例积分调节器:比例放大系数Kp =21,积分时间常数t =0.088s。
为了实现突变输入量,我选择了两个阶跃信号输入,第一个的波形图如图18所示。横坐标为时间(s),纵坐标为输入控制量Un*(V),该输入控制量在第1秒时刻阶跃到10V。

图18 一号控制输入量波形图
Fig.18 No.1 controls the input waveform chart
第二个的波形图如图19所示。横坐标为时间(s),纵坐标为输入控制量Un*(V),该输入控制量在第2秒时刻阶跃到2V。

图19 二号控制输入量波形图
Fig.19 No.2 controls the input waveform chart
两个波形进行叠加得到完整的控制输入量的突变波形图如图20所示。

图20实际控制输入量波形图
Fig.20 The actual control input waveform chart
为了实现突变负载,我采用了类似的方法选择了两个阶跃信号,第一个的电流波形图如图21所示。坐标为时间(s),纵坐标为负载电流IdL(A),该负载电流在第1秒时刻阶跃到1A。

图21 一号负载电流波形图
Fig.21 Load No. 1 current waveform
第二个的波形图如图22所示。横坐标为时间(s),纵坐标为负载电流IdL(A),该负载电流在第2秒时刻阶跃到150A。

图22 二号负载电流波形图
Fig.22 Load No. 2 current waveform
两个波形进行叠加得到完整的负载电流的突变波形图如图23所示。

图23 实际负载电流波形图
Fig.23 Actual load current waveform
3.2 实验仿真结果
3.2.1 突加控制输入量仿真实验
该实验的具体步骤如下:
1.打开MATLAB中的Simulink;
2.创建一个Blank Model;
3.然后在Library Browser中添加以下模块:Step、Add、Sum、Gain、Transfer Fcn、Scope;
4.并将所有模块进行排版连线得到图14所示的有静差的比例调速系统的仿真框图;
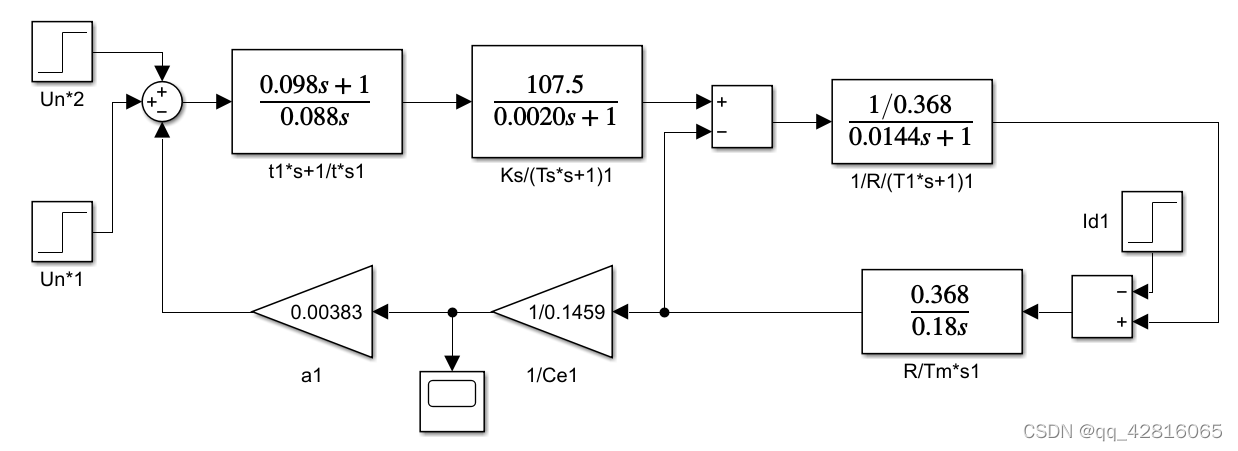
图24 无静差的比例积分调速系统的仿真框图
Fig.24 Simulation block diagram of a proportional integration speed control system without static difference
5.修改模块参数:
Un*1:Final Value改为10;
Un*2:Step Time改为2,Final Value改为2;
t1*s+1/t*s1:Numerator coefficients修改为[0.098 1],Denominator coefficients修改为[0.088 0];
Id1:不做修改;
Ks/(Ts*s+1)1:Numerator coefficients修改为[107.5],Denominator coefficients修改为[0.0020 1];
1/R/(T1*s+1)1:Numerator coefficients修改为[1/0.368],Denominator coefficients修改为[0.0144 1];
R/Tm*s1:Numerator coefficients修改为[0.368],Denominator coefficients修改为[0.18 0];
1/Ce1:Gain修改为1/0.1459;
a1:Gain修改为0.00383;
6.双击打开Scope,点击运行按钮,进行仿真,获得图25所示的动态过程仿真结果。

图27 突加负载的动态过程仿真结果图
Fig.27 Graph of dynamic process simulation results for burst load
4 结论
有静差的比例调速系统在遇到控制输入量突变时,系统能在毫秒级反应并调节到指定的转速。在调节过程中,转速没有出现超调量;当遇到负载突变时,系统能在毫秒级反应,但最终调整到的转速低于目标值,在调节过程中,转速没有出现超调量,此时系统出现的静差,分析该系统的机械特性得知是由电枢回路总电阻引起的。
无静差的比例积分调速系统在遇到控制输入量突变时,系统能在毫秒级反应并调节到指定的转速。在调节过程中,转速有出现超调量。同时调节的速度比有静差的比例调速系统慢,这是由加入积分环节导致调节时间的增长;当遇到负载突变时,系统能在毫秒级反应,最终调整到的转速等于目标值,此时系统没有出现的静差,这是由于积分环节调节出来的结果。但调节的速度比有静差的比例调速系统慢,快速性略差。
参考文献
[1] 陈伯时. 电力拖动自动控制系统[M]. 北京:机械工业出版社,2003.
[2] 阮毅, 陈维钧. 运动控制系统. 北京:清华大学出版社, 2006.
[3] 刘白雁. 机电系统动态仿真 —基于matlab/simulink. 北京:机械工业出版社 2005.
智能推荐
C#连接OPC C#上位机链接PLC程序源码 1.该程序是通讯方式是CSharp通过OPC方式连接PLC_c#opc通信-程序员宅基地
文章浏览阅读565次。本文主要介绍如何使用C#通过OPC方式连接PLC,并提供了相应的程序和学习资料,以便读者学习和使用。OPC服务器是一种软件,可以将PLC的数据转换为标准的OPC格式,允许其他软件通过标准接口读取或控制PLC的数据。此外,本文还提供了一些学习资料,包括OPC和PLC的基础知识,C#编程语言的教程和实例代码。这些资料可以帮助读者更好地理解和应用本文介绍的程序。1.该程序是通讯方式是CSharp通过OPC方式连接PLC,用这种方式连PLC不用考虑什么种类PLC,只要OPC服务器里有的PLC都可以连。_c#opc通信
Hyper-V内的虚拟机复制粘贴_win10 hyper-v ubuntu18.04 文件拷贝-程序员宅基地
文章浏览阅读1.6w次,点赞3次,收藏10次。实践环境物理机:Windows10教育版,操作系统版本 17763.914虚拟机:Ubuntu18.04.3桌面版在Hyper-V中的刚安装好Ubuntu虚拟机之后,会发现鼠标滑动很不顺畅,也不能向虚拟机中拖拽文件或者复制内容。在VMware中,可以通过安装VMware tools来使物理机和虚拟机之间达到更好的交互。在Hyper-V中,也有这样的工具。这款工具可以完成更好的鼠标交互,我的..._win10 hyper-v ubuntu18.04 文件拷贝
java静态变量初始化多线程,持续更新中_类初始化一个静态属性 为线程池-程序员宅基地
文章浏览阅读156次。前言互联网时代,瞬息万变。一个小小的走错,就有可能落后于别人。我们没办法去预测任何行业、任何职业未来十年会怎么样,因为未来谁都不能确定。只能说只要有互联网存在,程序员依然是个高薪热门行业。只要跟随着时代的脚步,学习新的知识。程序员是不可能会消失的,或者说不可能会没钱赚的。我们经常可以听到很多人说,程序员是一个吃青春饭的行当。因为大多数人认为这是一个需要高强度脑力劳动的工种,而30岁、40岁,甚至50岁的程序员身体机能逐渐弱化,家庭琐事缠身,已经不能再进行这样高强度的工作了。那么,这样的说法是对的么?_类初始化一个静态属性 为线程池
idea 配置maven,其实不用单独下载Maven的。以及设置新项目配置,省略每次创建新项目都要配置一次Maven_安装idea后是不是不需要安装maven了?-程序员宅基地
文章浏览阅读1w次,点赞13次,收藏43次。说来也是惭愧,一直以来,在装环境的时候都会从官网下载Maven。然后再在idea里配置Maven。以为从官网下载的Maven是必须的步骤,直到今天才得知,idea有捆绑的 Maven 我们只需要搞一个配置文件就行了无需再官网下载Maven包以后再在新电脑装环境的时候,只需要下载idea ,网上找一个Maven的配置文件 放到 默认的 包下面就可以了!也省得每次创建项目都要重新配一次Maven了。如果不想每次新建项目都要重新配置Maven,一种方法就是使用默认的配置,另一种方法就是配置 .._安装idea后是不是不需要安装maven了?
奶爸奶妈必看给宝宝摄影大全-程序员宅基地
文章浏览阅读45次。家是我们一生中最重要的地方,小时候,我们在这里哭、在这里笑、在这里学习走路,在这里有我们最真实的时光,用相机把它记下吧。 很多家庭在拍摄孩子时有一个看法,认为儿童摄影团购必须是在风景秀丽的户外,即便是室内那也是像大酒店一样...
构建Docker镜像指南,含实战案例_rocker/r-base镜像-程序员宅基地
文章浏览阅读429次。Dockerfile介绍Dockerfile是构建镜像的指令文件,由一组指令组成,文件中每条指令对应linux中一条命令,在执行构建Docker镜像时,将读取Dockerfile中的指令,根据指令来操作生成指定Docker镜像。Dockerfile结构:主要由基础镜像信息、维护者信息、镜像操作指令、容器启动时执行指令。每行支持一条指令,每条指令可以携带多个参数。注释可以使用#开头。指令说明FROM 镜像 : 指定新的镜像所基于的镜像MAINTAINER 名字 : 说明新镜像的维护(制作)人,留下_rocker/r-base镜像
随便推点
毕设基于微信小程序的小区管理系统的设计ssm毕业设计_ssm基于微信小程序的公寓生活管理系统-程序员宅基地
文章浏览阅读223次。该系统将提供便捷的信息发布、物业报修、社区互动等功能,为小区居民提供更加便利、高效的服务。引言: 随着城市化进程的加速,小区管理成为一个日益重要的任务。因此,设计一个基于微信小程序的小区管理系统成为了一项具有挑战性和重要性的毕设课题。本文将介绍该小区管理系统的设计思路和功能,以期为小区提供更便捷、高效的管理手段。四、总结与展望: 通过本次毕设项目,我们实现了一个基于微信小程序的小区管理系统,为小区居民提供了更加便捷、高效的服务。通过该系统的设计与实现,能够提高小区管理水平,提供更好的居住环境和服务。_ssm基于微信小程序的公寓生活管理系统
如何正确的使用Ubuntu以及安装常用的渗透工具集.-程序员宅基地
文章浏览阅读635次。文章来源i春秋入坑Ubuntu半年多了记得一开始学的时候基本一星期重装三四次=-= 尴尬了 觉得自己差不多可以的时候 就吧Windows10干掉了 c盘装Ubuntu 专心学习. 这里主要来说一下使用Ubuntu的正确姿势Ubuntu(友帮拓、优般图、乌班图)是一个以桌面应用为主的开源GNU/Linux操作系统,Ubuntu 是基于DebianGNU/Linux,支..._ubuntu安装攻击工具包
JNI参数传递引用_jni引用byte[]-程序员宅基地
文章浏览阅读335次。需求:C++中将BYTE型数组传递给Java中,考虑到内存释放问题,未采用通过返回值进行数据传递。public class demoClass{public native boolean getData(byte[] tempData);}JNIEXPORT jboolean JNICALL Java_com_core_getData(JNIEnv *env, jobject thisObj, jbyteArray tempData){ //resultsize为s..._jni引用byte[]
三维重建工具——pclpy教程之点云分割_pclpy.pcl.pointcloud.pointxyzi转为numpy-程序员宅基地
文章浏览阅读2.1k次,点赞5次,收藏30次。本教程代码开源:GitHub 欢迎star文章目录一、平面模型分割1. 代码2. 说明3. 运行二、圆柱模型分割1. 代码2. 说明3. 运行三、欧几里得聚类提取1. 代码2. 说明3. 运行四、区域生长分割1. 代码2. 说明3. 运行五、基于最小切割的分割1. 代码2. 说明3. 运行六、使用 ProgressiveMorphologicalFilter 分割地面1. 代码2. 说明3. 运行一、平面模型分割在本教程中,我们将学习如何对一组点进行简单的平面分割,即找到支持平面模型的点云中的所有._pclpy.pcl.pointcloud.pointxyzi转为numpy
以NFS启动方式构建arm-linux仿真运行环境-程序员宅基地
文章浏览阅读141次。一 其实在 skyeye 上移植 arm-linux 并非难事,网上也有不少资料, 只是大都遗漏细节, 以致细微之处卡壳,所以本文力求详实清析, 希望能对大家有点用处。本文旨在将 arm-linux 在 skyeye 上搭建起来,并在 arm-linux 上能成功 mount NFS 为目标, 最终我们能在 arm-linux 里运行我们自己的应用程序. 二 安装 Sky..._nfs启动 arm
攻防世界 Pwn 进阶 第二页_pwn snprintf-程序员宅基地
文章浏览阅读598次,点赞2次,收藏5次。00为了形成一个体系,想将前面学过的一些东西都拉来放在一起总结总结,方便学习,方便记忆。攻防世界 Pwn 新手攻防世界 Pwn 进阶 第一页01 4-ReeHY-main-100超详细的wp1超详细的wp203 format2栈迁移的两种作用之一:栈溢出太小,进行栈迁移从而能够写入更多shellcode,进行更多操作。栈迁移一篇搞定有个陌生的函数。C 库函数 void *memcpy(void *str1, const void *str2, size_t n) 从存储区 str2 _pwn snprintf