机器人的振动控制问题_医疗机器人残余振动产生的原因-程序员宅基地
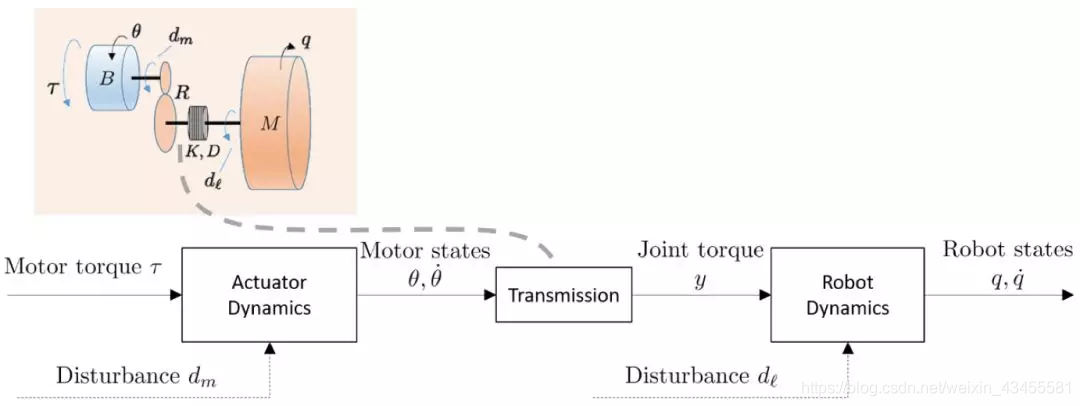

当机器人控制系统的设计将关节柔性忽略时,也许电机的运动位置能够被较为精确的控制,然而在加速度很高的情况下,大传动力会导致机器人的连杆位置与电机位置出现较大偏差,同时在运动结束时机器人连杆将在其平衡位置附近进行较长时间的振动。
方案1:基于反馈的振动控制
如果我们可以较为精确的同时测量机器人电机与连杆的位置甚至速度,那么便有可能通过机器人连杆轨迹与参考运动轨迹的偏差来调整电机的控制力矩,从而实现对机器人连杆位置的精确控制来消除由于弹性变形导致的振动。这种反馈控制问题可以通过例如Integrator Backstepping之类的非线性控制方法来解决。
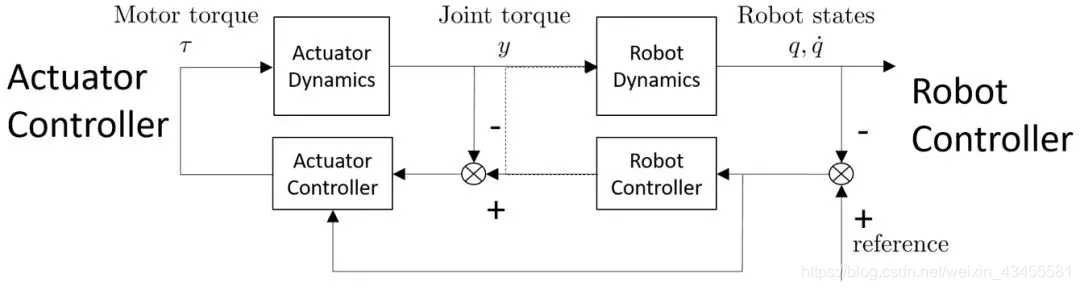
设计思路如下图所示:
- 1)首先将机器人连杆侧看作以关节传动力y为输入,以连杆位置q为输出的系统,并针对其特性设计能够实现精确连杆位置控制的机器人控制器Robot Controller以产生参考关节传动力;
- 2)其次通过李雅普诺夫稳定性理论设计能够同时保证连杆位置误差与传动力控制误差收敛的驱动器控制器Actuator Controller,这一控制器以连杆实际位置误差与关节传动力控制误差为输入,以电机力矩为输出。通过这一设计,即使在关节具有很大柔性的情况下,机器人连杆位置也能够被精确的控制从而消除振动。
即:Integrator Backstepping反馈控制器
在实际使用中,为了消除模型参数误差等因素的影响,需要加入自适应控制等其他控制方法。
大体来说,在机器人同时具有电机侧与连杆侧的传感器,并且在控制器设计中充分考虑动力学特性的前提下,反馈控制能够在很大程度上弥补由于机械结构柔性所造成的振动问题。
方案2:基于前馈的振动控制
在传感器数量不足的情况下,前馈控制成为了振动抑制的一种可行选择。
柔性工具或负载的动态特性可以通过线性系统近似建模,机器人运动控制的目标为驱动柔性负载的末端达到指定位置。由于负载自身存在柔性,当加快机器人的运动速度时,负载末端将出项明显的变形。
在各种对这种线性系统进行振动抑制的前馈方法中,输入整形Input Shaping是最为简单有效的方法。
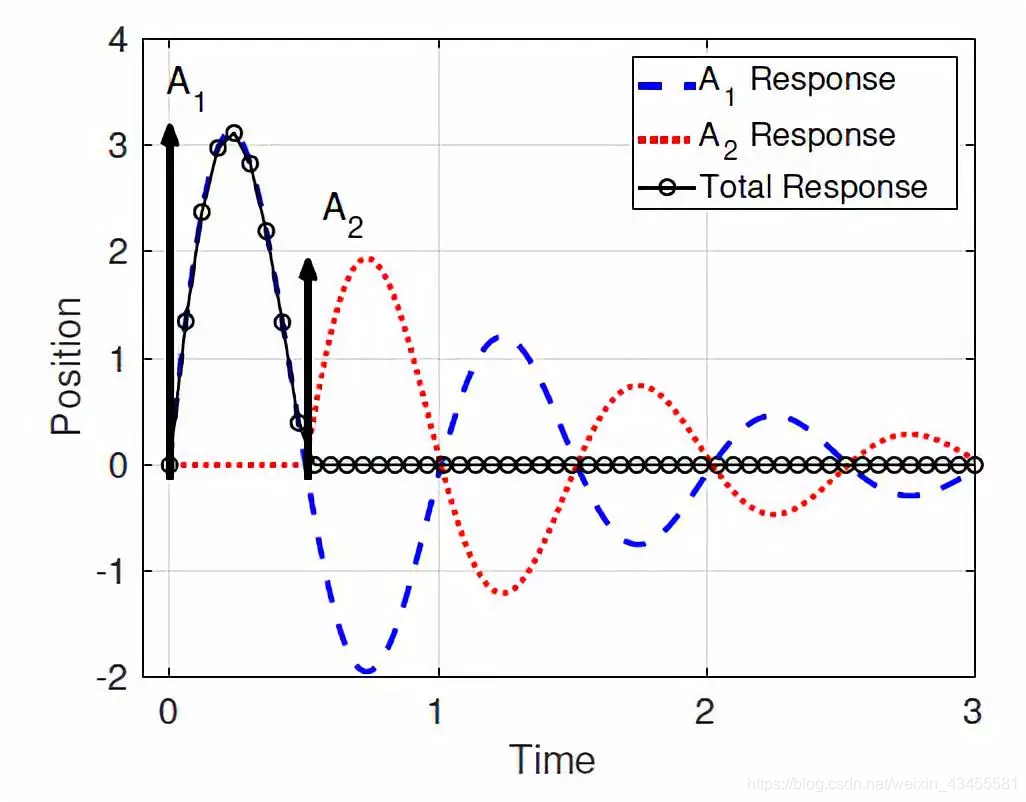
Input Shaping的原理非常简单:如果存在某个会导致系统产生残余振动的输入信号A,那么必然存在一个能够通过将原有输入进行适当延迟与缩放后得到的信号B,使得当信号A与B共同作于的结果是在某个时间点之后系统不存在残余振动。这一原理如图九所示,其中蓝线为信号A对应的系统响应,红线为信号B对应的系统响应,黑线为将A与B叠加后的系统响应。可以看到在图中A与B叠加的信号使得系统在0.5s之后没有残余振动。
当然Input Shaping并不是没有任何缺陷,其中最大的问题在于Input Shaping这一方法本身会对系统响应引入延迟,这一延迟为系统半固有周期的倍数(例如0.5周期,1个周期,1.5个周期…),同时这一延迟会随着Input Shaping设计鲁棒性的增强而增长。由于这一延迟的存在,Input Shaping消除系统振动的同时也减慢了运动速度。
为了解决Input Shaping的延迟问题,一种自然的思路便是将系统原有输入信号加速以缩短运动时间,然后对加速后的信号执行Shaping。这样即使Input Shaping引入了延迟,被加速之后再被延迟的信号仍然能实现与原有输入信号相同的长度。Zero Time Delay Input Shaping便是基于这种思路设计的方法。
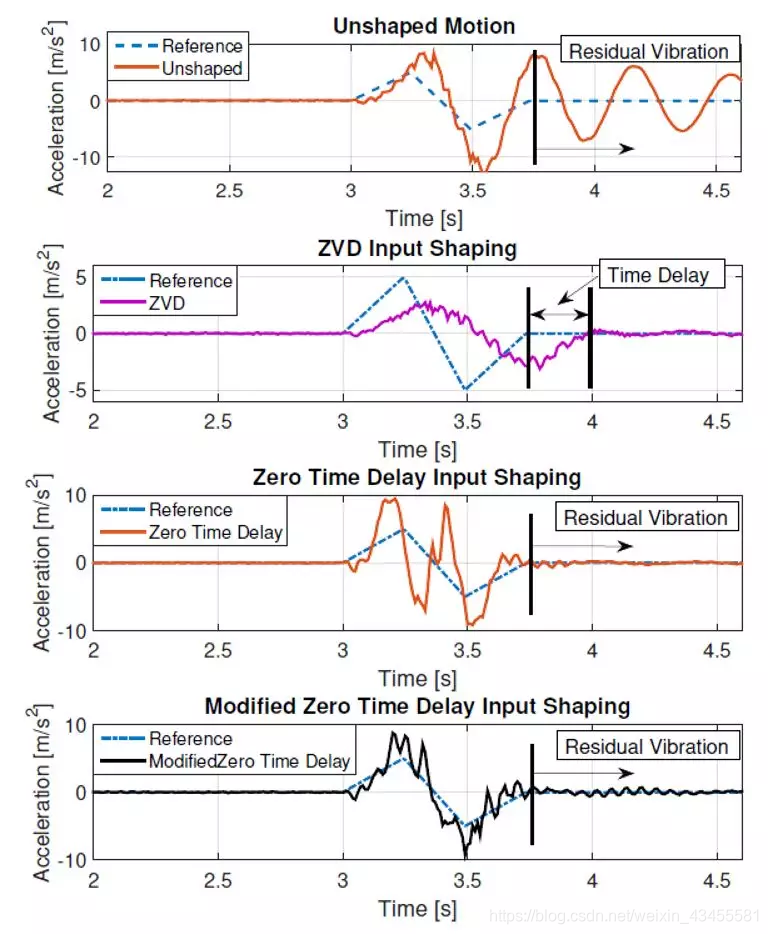
在实际测试中,Zero Time Delay Input Shaping 被证实能够在有效减小系统残余振动的前提下不引入延迟。然而,当期望的运动时间和系统的固有周期接近时,系统原有的输入信号需要被大幅加速,这一操作将导致经过加速再Shaping后的信号非常不光滑,从而造成更加严重的高频振动。Modified Zero Time Delay Input Shaping正是为了解决这一问题而提出的设计。Modified Zero Time Delay Input Shaping的设计认为,如果能够减小Input Shaping所需要的延迟时间,那么对原有输入信号的加速操作的负担将大为减轻,从而减小产生不光滑输入信号的可能性。
下图为Modified Zero Time Delay Input Shaping.
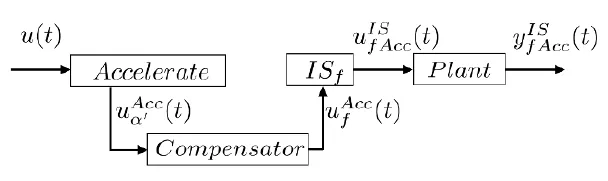
Modified Zero Time Delay Input Shaping的设计应用了Laplace变换的基本性质,即:如果将信号f与信号g同时进行时域的缩放(例如同时加速),那么缩放后的f’与g’的卷积f’*g’将与f*g成比例。利用这一性质,可以对系统设计特定的Compensator,使得系统对任意输入的响应均相当于对原始响应进行加速后的结果。这样相当于缩短了系统的固有周期,从而使得Input Shaping所需的延迟时间变得更短 。实验结果显示Modified Zero Time Delay Input Shaping与Zero Time Delay Input Shaping相比都可以在不引入延迟的情况下有效抑制残余振动,但是Modified Zero Time Delay Input Shaping能够避免输入信号的不光滑,如下图所示。
[1] Yu Z , Tomizuka M . Modified Zero Time Delay Input Shaping for Industrial Robot With Flexibility[C]// Asme Dynamic Systems & Control Conference. 2017.
智能推荐
监听网络变化--含7.0以上适配_android.net.conn.connectivity_change-程序员宅基地
文章浏览阅读3.7k次,点赞3次,收藏7次。我们知道最早监听网络变化,是通过广播,静态或动态注册广播,处理"android.net.conn.CONNECTIVITY_CHANGE"这个action就可以了intent就可以了。我们发现"android.net.conn.CONNECTIVITY_CHANGE"这个action已经加了注解@Deprecated,不推荐使用了。根据注释说明,7.0及以上静态注册广播(manifest中)..._android.net.conn.connectivity_change
计算机学习目标_bytetrack+yolov5 c++-程序员宅基地
文章浏览阅读291次。开个坑_bytetrack+yolov5 c++
fatal error: filesystem: 没有那个文件或目录_fatal error: filesystem: no such file or directory-程序员宅基地
文章浏览阅读4.8k次,点赞12次,收藏39次。fatal error: filesystem: 没有那个文件或目录_fatal error: filesystem: no such file or directory
2020起重机械指挥作业考试题库及起重机械指挥模拟考试系统_换算英制直径5分钢丝绳为公制多少毫米?()。-程序员宅基地
文章浏览阅读1k次。题库来源:安全生产模拟考试一点通公众号小程序2020起重机械指挥作业考试题库及起重机械指挥模拟考试系统,包含起重机械指挥作业考试题库答案解析及起重机械指挥模拟考试系统练习。由安全生产模拟考试一点通公众号结合国家起重机械指挥考试最新大纲及起重机械指挥考试真题出具,有助于起重机械指挥考试试题考前练习。1、【判断题】指挥人员负责对可能出现的事故采取必要的防范措施。(√)2、【判断题】手势信号包括通用手势信号、专用手势信号和其它指挥信号。()(×)3、【判断题】吊装用的短环链,不..._换算英制直径5分钢丝绳为公制多少毫米?()。
大数据应用丨大数据时代的医学公共数据库与数据挖掘技术简介_dryad数据库-程序员宅基地
文章浏览阅读1.7k次,点赞2次,收藏25次。本文我们将介绍几种数据库和数据挖掘技术,帮助临床研究人员更好地理解和应用数据库技术。数据挖掘技术可以从大量数据中寻找潜在有价值的信息,主要分为数据准备、数据挖掘、以及结果表达和分析。数据库技术是研究、管理和应用数据库的一门软件科学。通过研究数据库的结构、存储、设计、管理和应用的基本理论和实现方法,对数据库中的数据进行处理和分析。_dryad数据库
Java实现生成数据库表结构文档(生成工具screw的使用)_java实现数据库表文档-程序员宅基地
文章浏览阅读1.8k次。screw_java实现数据库表文档
随便推点
SpringBoot整合Elastic-job实现_springboot + elasticjob-程序员宅基地
文章浏览阅读3.1k次,点赞3次,收藏13次。SpringBoot整合Elastic-job实现【基本整合】:原理参考:Elastic-Job原理(1)引用pom依赖:<dependency> <groupId>com.dangdang</groupId> <artifactId>elastic-job-lite-core</artifactId> <..._springboot + elasticjob
Attensleep:一种基于注意力的单通道EEG睡眠分期深度学习方法_an attention-based deep learning approach for slee-程序员宅基地
文章浏览阅读791次。AttenSleep 基于注意力的深度学习架构从单通道EEG信号中进行睡眠阶段分类从基于多分辨率卷积神经网络( MRCNN )和自适应特征重标定( AFR )的特征提取模块入手。MRCNN可以提取低频和高频特征,而AFR可以通过建模特征之间的相互依赖关系来提高提取特征的质量。第二个模块是时间上下文编码器( TCE ),它利用多头注意力机制来捕获提取特征之间的时间依赖关系。特别地,多头注意力利用因果卷积对输入特征中的时间关系进行建模。使用三个公共数据集来评估提出的AttnSleep模型的性能。_an attention-based deep learning approach for sleep stage classification wit
Myeclipse技巧-程序员宅基地
文章浏览阅读71次。在了解MyEclipse使用技巧之前我们来看看MyEclipse是什么呢?简单而言,MyEclipse是Eclipse的插件,也是一款功能强大的J2EE集成开发环境,支持代码编写、配置、测试以及除错。下面让我们看看MyEclipse使用技巧的具体内容。MyEclipse使用技巧第一步: 取消自动validationvalidation有一堆,什么xml、jsp、jsf..._myeclipse是什么
c语言统计数组每个数出现的次数,统计数组中某个元素出现的次数和重复的次数...-程序员宅基地
文章浏览阅读8.9k次。//出现的次数function times(arr){var m=0,times=0;//m是数组中的元素,times用来统计出现的次数// for循环遍历arr数组for(var i=0;iif(arr[i]==m){times++;//数组中有相同值就加1}}return times;console.log(times);//这是打印出的出现的次数}times([0, 1, 2, 0, 1, ..._c语言统计数组中每个数字出现的次数
Jmeter连接InfluxDB2.0.4_influxdborganization jmeter-程序员宅基地
文章浏览阅读2.5k次,点赞5次,收藏14次。Jmeter连接InfluxDB2.0.4问题描述:在用Jmeter+InfluxDB构建监控时,因为docker构建的InfluxDB的版本是2.0.4,按照网上的教程进行后端监听器的填写,但是一直出现错误提示401等问题。网上的教程大多是1.X版本的,怀疑是数据库版本不一致导致的数据无法写入,通过调研,问题已解决。以下为配置方法。一、InfluxDB搭建完成后,查看Organization和Bucket名称,这里是ORZ_test和bucket_nameOrganization在这里我的理解_influxdborganization jmeter
关于第三方支付,看这篇文章就够了!-程序员宅基地
文章浏览阅读1.6k次。目录 目录 1、第三方支付概述 2、第三方支付起源 PayPal 支付宝 3、牌照发放 4、支付牌照 5、第三方支付参与者 6、第三方支付行业监管 监管意图对第三方支付可能产生的影响..._第三方支付本行对本行的费用