ROS机器人虚拟仿真挑战赛本地电脑环境配置测试-程序员宅基地
技术标签: 机器人
预备基础
此案例需要完成:
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录-程序员宅基地
ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总-程序员宅基地
命令测试
在不同的终端窗口分别输入:
标签1:
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch标签2:
rosrun tianracer_gazebo judge_system_node.py如果小车没有移动:


rviz中没有路径规划。
需要查找相应文件修改路径的位置。
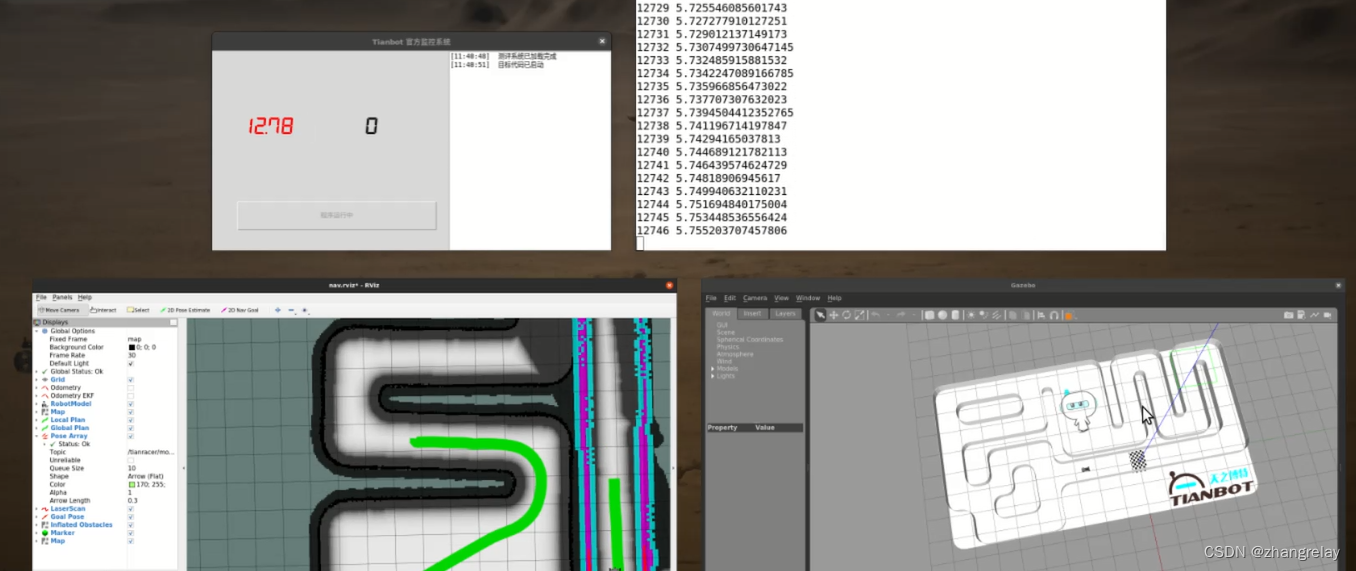
能动起来的rviz和gazebo如下所示:


路径点相关:
阿克曼模型也可以采用类似模式设计控制器。
录屏:
ROS机器人虚拟仿真挑战赛本地电脑环境配置测试
轨迹路径问题
本校《移动机器人设计与实践》和《ROS机器人程序设计》均采用课+赛+证结合模式。
参考:
在f1tenth仿真中如何实现更快速的跑圈-曲线分析篇-程序员宅基地
证书
完全自愿参与,无任何强制。
详细总结如下:
一、预备基础
在进行ROS机器人虚拟仿真挑战赛前,需要完成本地电脑的环境配置。这通常包括安装ROS系统、配置ROS环境变量、安装必要的ROS包以及设置工作空间等。参考“ROS机器人虚拟仿真挑战赛本地电脑环境配置记录”和“个人问题汇总”两篇博客,可以帮助我们避免一些常见的配置错误,并提前解决可能出现的问题。
二、命令测试
在配置好环境后,我们需要在不同的终端窗口输入命令来测试ROS系统的运行情况。
- 标签1命令:
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch
这个命令用于启动Tianracer在Gazebo中的仿真,并使用TEB局部规划器进行导航。如果小车没有移动,那么我们需要检查Gazebo和RViz的界面,以及ROS的日志输出,看是否有错误信息。 - 标签2命令:
rosrun tianracer_gazebo judge_system_node.py
这个命令用于运行Tianracer的评分系统节点。如果小车没有移动,评分系统可能无法正常工作。
三、路径规划问题
如果在RViz中没有看到路径规划,那么可能是因为路径规划器没有正确配置或者没有接收到正确的传感器数据。我们需要检查路径规划相关的配置文件,确保路径规划器的参数设置正确,并且传感器数据能够正确传递给路径规划器。
四、轨迹路径问题
差动驱动机器人的轨迹设计是机器人导航的关键部分。阿克曼模型是一种常用的轨迹设计模型,适用于差动驱动机器人。我们可以参考相关博客和教程,学习如何使用阿克曼模型设计机器人的轨迹,并在仿真环境中进行测试。
五、课程与证书
《移动机器人设计与实践》和《ROS机器人程序设计》这两门课程采用课+赛+证结合模式,旨在通过实践和学习,提升学生的机器人设计和编程能力。参加ROS机器人虚拟仿真挑战赛并获得证书,是对自己学习成果的一种肯定,也是对未来求职或深造的有力支持。虽然证书是完全自愿参与的,但获得证书可以作为一种能力的证明,提升自己在相关领域的竞争力。
总的来说,ROS机器人虚拟仿真挑战赛不仅是一个学习和实践的平台,也是一个挑战自我、提升能力的机会。通过参与比赛,我们可以深入了解ROS系统的运作机制,掌握机器人设计和编程的技巧,为未来的职业发展打下坚实的基础。
进一步扩展“ROS机器人虚拟仿真挑战赛”的详细总结如下:
一、预备基础
在进行ROS机器人虚拟仿真挑战赛前,完成本地电脑的环境配置是不可或缺的第一步。这涉及到对ROS系统的深入理解和一系列复杂的配置步骤。
首先,需要确保已经安装了与挑战赛要求相匹配的ROS发行版。不同的发行版在功能和API上可能有所差异,因此选择正确的发行版至关重要。安装完成后,还需要配置ROS的环境变量,以确保系统能够正确识别ROS的相关路径和命令。
接下来,需要安装必要的ROS包。这些包可能包括用于机器人仿真的Gazebo、用于可视化的RViz、用于路径规划的TEB局部规划器等。安装这些包时,需要注意包的版本和依赖关系,以确保它们能够正常工作。
最后,需要设置ROS的工作空间。工作空间是ROS中用于组织代码和资源的重要概念,它包括了源代码、构建结果和安装目录等。正确设置工作空间可以方便我们对代码进行管理和维护。
在配置过程中,可能会遇到一些个人问题。参考相关的博客和教程,可以帮助我们快速定位并解决问题。同时,也可以加入ROS的社区和论坛,与其他ROS开发者交流经验和技巧。
二、命令测试
完成环境配置后,我们需要通过命令测试来验证ROS系统的运行情况。
首先,通过roslaunch命令启动Tianracer在Gazebo中的仿真。这个命令会加载Tianracer的仿真配置文件,并在Gazebo中创建一个虚拟的机器人环境。如果小车没有移动,我们需要检查Gazebo界面中的机器人模型是否加载成功,以及是否有任何错误或警告信息。
然后,通过rosrun命令运行Tianracer的评分系统节点。这个节点会接收来自仿真环境的数据,并根据一定的规则对机器人的表现进行评分。如果评分系统没有正常工作,我们需要检查节点的日志输出,看是否有任何异常或错误信息。
在测试过程中,我们还可以使用RViz来可视化机器人的状态和轨迹。通过RViz,我们可以直观地看到机器人的位置、朝向以及规划出的路径等信息。如果RViz中没有显示路径规划,我们需要检查路径规划器的配置和传感器数据的传递是否正确。
三、路径规划问题
路径规划是机器人导航的关键部分,它涉及到从起点到终点的最优路径选择。在ROS中,有多种路径规划器可供选择,如全局路径规划器和局部路径规划器等。
对于Tianracer的仿真环境,我们使用了TEB局部规划器进行导航。TEB规划器是一种基于时间弹性的局部路径规划器,它能够在考虑机器人动力学约束的同时优化路径的平滑性和时间效率。然而,如果RViz中没有显示路径规划,那么可能是TEB规划器的配置参数不正确或者传感器数据没有正确传递给规划器。
为了解决这个问题,我们需要检查TEB规划器的配置文件,确保其中的参数设置符合Tianracer机器人的特性和要求。特别是与机器人动力学约束、障碍物避障以及路径平滑性相关的参数,需要进行仔细的调整和测试。
此外,我们还需要确保传感器数据能够正确传递给TEB规划器。这涉及到传感器数据的采集、处理和发布等步骤。我们需要检查传感器的驱动程序和ROS节点是否正常工作,以及传感器数据是否与规划器所需的格式和频率相匹配。
四、轨迹路径问题
差动驱动机器人的轨迹设计是实现自主导航的关键环节。阿克曼模型是一种常用的轨迹设计模型,它适用于差动驱动机器人的运动特性。
在阿克曼模型中,机器人的运动被描述为一系列圆弧和直线的组合。通过合理设计这些圆弧和直线的参数,我们可以实现机器人的平滑运动和精确定位。在ROS中,我们可以使用阿克曼模型来设计机器人的轨迹,并通过控制机器人的线速度和角速度来实现轨迹的跟踪。
然而,轨迹设计并不是一件简单的事情。它需要考虑机器人的动力学约束、环境障碍物以及任务要求等多个因素。为了获得更好的轨迹效果,我们可以使用优化算法对轨迹进行优化,以找到最优的路径和速度组合。
此外,我们还可以通过仿真环境对轨迹进行测试和验证。在Tianracer的仿真环境中,我们可以使用Gazebo和RViz来观察机器人的运动轨迹和状态,并根据测试结果对轨迹进行调整和优化。
五、课程与证书
参与《移动机器人设计与实践》和《ROS机器人程序设计》这两门课程,不仅可以帮助我们深入学习ROS系统和机器人技术,还可以提升我们的实践能力和解决问题的能力。通过课程中的理论学习和实践操作,我们可以掌握ROS的基本概念和工具,了解机器人的感知、决策和控制等方面的知识。
同时,参加ROS机器人虚拟仿真挑战赛并获得证书,是对我们学习成果的一种肯定和认可。证书可以作为我们求职或深造的加分项,提升我们在机器人领域的竞争力。虽然证书是自愿参与的,但获得证书可以激励我们更加努力地学习和实践,提升自己的技能水平。
总之,ROS机器人虚拟仿真挑战赛是一个充满挑战和机遇的平台。通过参与比赛和学习相关
课程,我们可以深入了解ROS系统的运作机制,掌握机器人设计和编程的技巧,为未来的职业发展打下坚实的基础。
六、竞赛经验与学习心得
参与ROS机器人虚拟仿真挑战赛,不仅仅是一个技术层面的挑战,更是一个全方位的学习与成长过程。
在竞赛过程中,我们可能会遇到各种各样的问题和挑战,比如机器人的路径规划失败、传感器数据异常、控制算法不稳定等。这些问题往往需要我们综合运用所学的ROS知识、机器人技术以及编程技能来分析和解决。在解决问题的过程中,我们会不断地尝试、调试和优化,从而逐渐掌握解决问题的方法和技巧。
此外,参与挑战赛还需要我们具备团队合作和沟通的能力。在团队中,每个人都有自己的专长和角色,我们需要相互协作、互相支持,共同完成任务。通过团队合作,我们可以学习到不同人的思维方式和解决问题的方法,提升自己的综合素质。
除了技术和团队方面的收获,参与挑战赛还能让我们更加深入地了解机器人领域的前沿技术和应用。通过与来自不同学校和行业的选手交流,我们可以了解到各种新的想法和解决方案,从而拓宽自己的视野和思路。
总的来说,参与ROS机器人虚拟仿真挑战赛是一次难得的学习和成长机会。通过挑战和锻炼,我们可以不断提升自己的技能水平和综合素质,为未来的职业发展做好充分的准备。
七、未来展望
随着机器人技术的不断发展和普及,ROS作为机器人领域的开源框架,其重要性和影响力也在不断提升。未来,ROS将在更多领域得到应用,包括工业自动化、智能家居、医疗服务等。
对于个人而言,掌握ROS技能和机器人技术将是我们未来职业发展的重要方向之一。通过不断学习和实践,我们可以将ROS应用于实际项目中,为企业和社会创造价值。同时,我们也可以利用ROS平台开展创新研究和探索,为机器人领域的发展做出贡献。
总之,ROS机器人虚拟仿真挑战赛只是我们学习和探索机器人技术的一个起点。未来,我们将继续深入学习和实践,不断提升自己的技能水平和综合素质,为机器人领域的发展贡献自己的力量。
智能推荐
React学习记录-程序员宅基地
文章浏览阅读936次,点赞22次,收藏26次。React核心基础
Linux查磁盘大小命令,linux系统查看磁盘空间的命令是什么-程序员宅基地
文章浏览阅读2k次。linux系统查看磁盘空间的命令是【df -hl】,该命令可以查看磁盘剩余空间大小。如果要查看每个根路径的分区大小,可以使用【df -h】命令。df命令以磁盘分区为单位查看文件系统。本文操作环境:red hat enterprise linux 6.1系统、thinkpad t480电脑。(学习视频分享:linux视频教程)Linux 查看磁盘空间可以使用 df 和 du 命令。df命令df 以磁..._df -hl
Office & delphi_range[char(96 + acolumn) + inttostr(65536)].end[xl-程序员宅基地
文章浏览阅读923次。uses ComObj;var ExcelApp: OleVariant;implementationprocedure TForm1.Button1Click(Sender: TObject);const // SheetType xlChart = -4109; xlWorksheet = -4167; // WBATemplate xlWBATWorksheet = -4167_range[char(96 + acolumn) + inttostr(65536)].end[xlup]
若依 quartz 定时任务中 service mapper无法注入解决办法_ruoyi-quartz无法引入ruoyi-admin的service-程序员宅基地
文章浏览阅读2.3k次。上图为任务代码,在任务具体执行的方法中使用,一定要写在方法内使用SpringContextUtil.getBean()方法实例化Spring service类下边是ruoyi-quartz模块中util/SpringContextUtil.java(已改写)import org.springframework.beans.BeansException;import org.springframework.context.ApplicationContext;import org.s..._ruoyi-quartz无法引入ruoyi-admin的service
CentOS7配置yum源-程序员宅基地
文章浏览阅读2w次,点赞10次,收藏77次。yum,全称“Yellow dog Updater, Modified”,是一个专门为了解决包的依赖关系而存在的软件包管理器。可以这么说,yum 是改进型的 RPM 软件管理器,它很好的解决了 RPM 所面临的软件包依赖问题。yum 在服务器端存有所有的 RPM 包,并将各个包之间的依赖关系记录在文件中,当管理员使用 yum 安装 RPM 包时,yum 会先从服务器端下载包的依赖性文件,通过分析此文件从服务器端一次性下载所有相关的 RPM 包并进行安装。_centos7配置yum源
智能科学毕设分享(算法) 基于深度学习的抽烟行为检测算法实现(源码分享)-程序员宅基地
文章浏览阅读828次,点赞21次,收藏8次。今天学长向大家分享一个毕业设计项目毕业设计 基于深度学习的抽烟行为检测算法实现(源码分享)毕业设计 深度学习的抽烟行为检测算法实现通过目前应用比较广泛的 Web 开发平台,将模型训练完成的算法模型部署,部署于 Web 平台。并且利用目前流行的前后端技术在该平台进行整合实现运营车辆驾驶员吸烟行为检测系统,方便用户使用。本系统是一种运营车辆驾驶员吸烟行为检测系统,为了降低误检率,对驾驶员视频中的吸烟烟雾和香烟目标分别进行检测,若同时检测到则判定该驾驶员存在吸烟行为。进行流程化处理,以满足用户的需要。
随便推点
STM32单片机示例:多个定时器同步触发启动_stm32 定时器同步-程序员宅基地
文章浏览阅读3.7k次,点赞3次,收藏14次。多个定时器同步触发启动是一种比较实用的功能,这里将对此做个示例说明。_stm32 定时器同步
android launcher分析和修改10,Android Launcher分析和修改9——Launcher启动APP流程(转载)...-程序员宅基地
文章浏览阅读348次。出处 : http://www.cnblogs.com/mythou/p/3187881.html本来想分析AppsCustomizePagedView类,不过今天突然接到一个临时任务。客户反馈说机器界面的图标很难点击启动程序,经常点击了没有反应,Boss说要优先解决这问题。没办法,只能看看是怎么回事。今天分析一下Launcher启动APP的过程。从用户点击到程序启动的流程,下面针对WorkSpa..._回调bubbletextview
Ubuntu 12 最快的两个源 个人感觉 163与cn99最快 ubuntu安装源下包过慢_un.12.cc-程序员宅基地
文章浏览阅读6.2k次。Ubuntu 12 最快的两个源 个人感觉 163与cn99最快 ubuntu下包过慢 1、首先备份Ubuntu 12.04源列表 sudo cp /etc/apt/sources.list /etc/apt/sources.list.backup (备份下当前的源列表,有备无患嘛) 2、修改更新源 sudo gedit /etc/apt/sources.list (打开Ubuntu 12_un.12.cc
vue动态路由(权限设置)_vue动态路由权限-程序员宅基地
文章浏览阅读5.8k次,点赞6次,收藏86次。1.思路(1)动态添加路由肯定用的是addRouter,在哪用?(2)vuex当中获取到菜单,怎样展示到界面2.不管其他先试一下addRouter找到router/index.js文件,内容如下,这是我自己先配置的登录路由现在先不管请求到的菜单是什么样,先写一个固定的菜单通过addRouter添加添加以前注意:addRoutes()添加的是数组在export defult router的上一行图中17行写下以下代码var addRoute=[ { path:"/", name:"_vue动态路由权限
JSTL 之变量赋值标签-程序员宅基地
文章浏览阅读8.9k次。 关键词: JSTL 之变量赋值标签 /* * Author Yachun Miao * Created 11-Dec-06 */关于JSP核心库的set标签赋值变量,有两种方式: 1.日期" />2. 有种需求要把ApplicationResources_zh_CN.prope
VGA带音频转HDMI转换芯片|VGA转HDMI 转换器方案|VGA转HDMI1.4转换器芯片介绍_vga转hdmi带音频转换器,转接头拆解-程序员宅基地
文章浏览阅读3.1k次,点赞3次,收藏2次。1.1ZY5621概述ZY5621是VGA音频到HDMI转换器芯片,它符合HDMI1.4 DV1.0规范。ZY5621也是一款先进的高速转换器,集成了MCU和VGA EDID芯片。它还包含VGA输入指示和仅音频到HDMI功能。进一步降低系统制造成本,简化系统板上的布线。ZY5621方案设计简单,且可以完美还原输入端口的信号,此方案设计广泛应用于投影仪、教育多媒体、视频会议、视频展台、工业级主板显示、手持便携设备、转换盒、转换线材等产品设计上面。1.2 ZY5621 特性内置MCU嵌入式VGA_vga转hdmi带音频转换器,转接头拆解