
”ros“ 的搜索结果

在PARAMETERS这里我们就能查阅到我们的ROS版本了,往后很多东西的安装都需要我们知道自己的ROS版本号。并回车,然后脚本就会自动检测我们的系统来判断适合我们的ROS安装选择。我们在这里选择桌面版,根上面的操作...
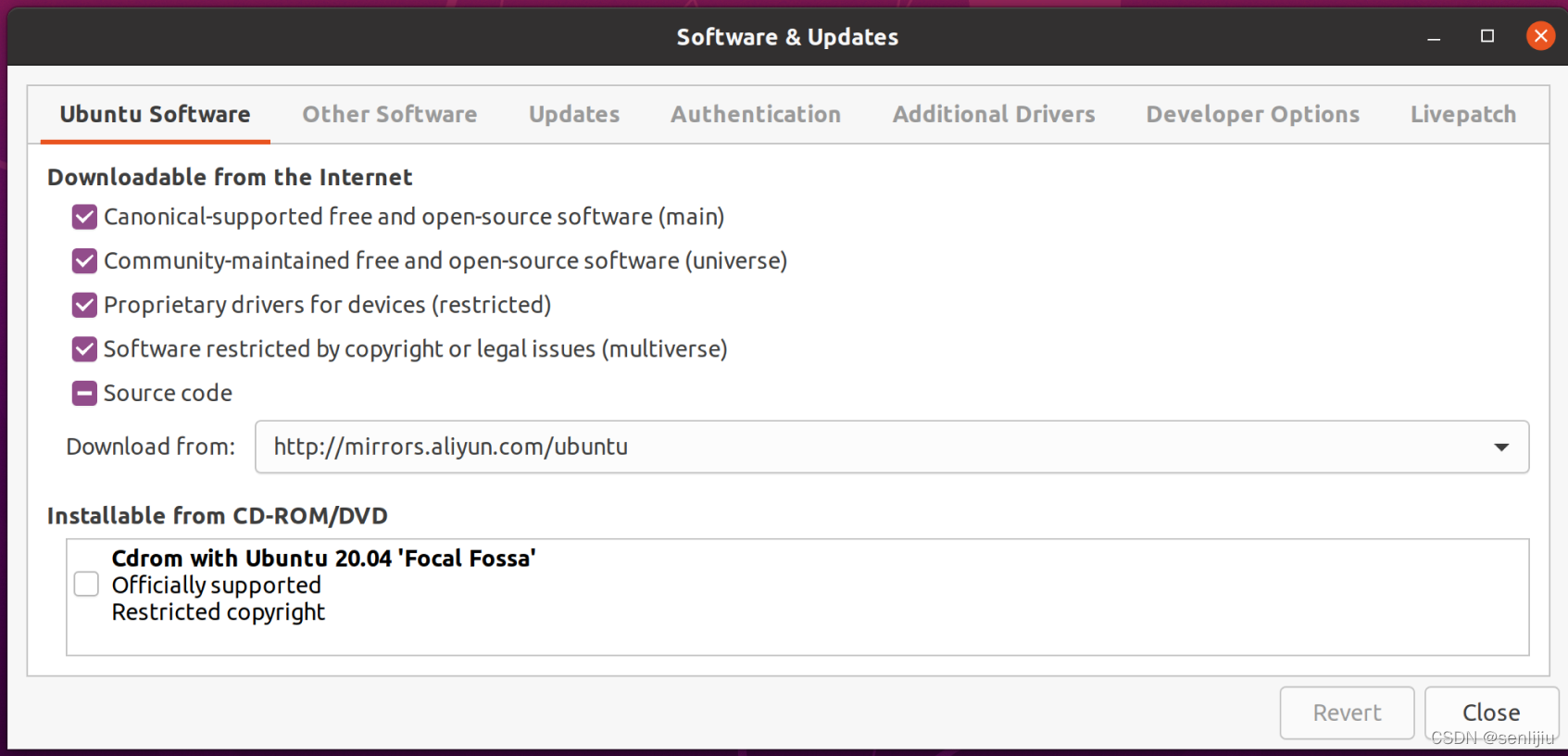
本节详细介绍了如何在ubuntu18上安装ros(melodic版本)借用鱼香ROS的一键安装,可以快速实现在ubuntu18上安装ROS。由于鱼香ROS一键安装做的非常的方便,其他办法还需要手动进行配置,我们就不再讲述了。
在本教程中,您将学习如何在 ROS 2 系统中导航。此外,您将启动您的第一个 ROS 2 节点并创建您自己的 ROS 工作区以用于进一步的教程。您可以使用文档中的给定链接获取更多信息。
我们在开发ROS2程序时会发现,当面对只有一个node节点时,程序的调用是线性的,这个时候就会有两种解决方式,一种就是使用rclcpp_components来完成对子节点的注册,并完成类似ROS1中Nodelets的操作。另外一种就是...
为帮助大家节省安装时间,小鱼制作了一键安装ROS2的脚本程序,可以非常便利的完成ROS2的安装和环境配置,接下来我们一起来体验下。注意:1和2两种安装方式选择一个即可,第一次建议使用一键安装ROS2,防止出错。

ROS安装与报错的解决办法
标签: ubuntu

rosdep update命令使用 1.首先将下面仓库的内容clone到本地 git clone https://github.com/ros/rosdistro.git 记录rosdistro存放地址,例如/home/gec/rosdistro ...cd /usr/lib/python2/dist-packages/ros
ROS与Unity通讯总结
标签: unity3d

如何建立ROS2的导航地图?在ROS2的服务器中,其中有一个地图服务器,该服务器与参数服务器类同,当外界节点请求的时候,将新的地图导入导航系统中。注意,这里新的地图就是因为场景足够大时,一张地图覆盖不了物理...
说起ROS,可能大家现在或多或少都有所了解。现如今世界机器人发展之迅猛犹如几十年前计算机行业一样,机器人也逐渐进入到千家万户,大到工业机器人,小到家用的服务型机器人,各式各样,为各种人们生活所需的机器人...
ROS仿真、专为自动驾驶研发提供的系统平台
rosbag是通过ros记录的数据格式,在使用ros框架的使用方便读写,但如果换了别的框架,就需要进行转换了。 直接用c++的流来读写是很不方便的,借用rosbag模块来读写比较方便 0x01获取rosbag中的topic 首先要知道ros...

先上代码 merge_bag.py: #!/usr/bin/env python ...from rosbag import Bag def main(): parser = argparse.ArgumentParser(description='Merge one or more bag files with the possibilities of filtering

学习ROS中曾经不止一次困惑ros::spin() 或 ros::spinOnce()的区别,现在回过头看却是很简单。另外ros消息队列之前也是迷迷糊糊,这次做个实验总结。 一、ros::spin() 或 ros::spinOnce() 这两个都是叫作ROS消息回调...
ROS 1 的迁移到ROS 2指南前言一、先决条件二、迁移步骤1.Package manifests2.元功能包Metapackages3.消息、服务和操作定义4.构建系统 Build system5.编译工具 Build tool6. 纯 Python 包6.更新 CMakeLists.txt 以...
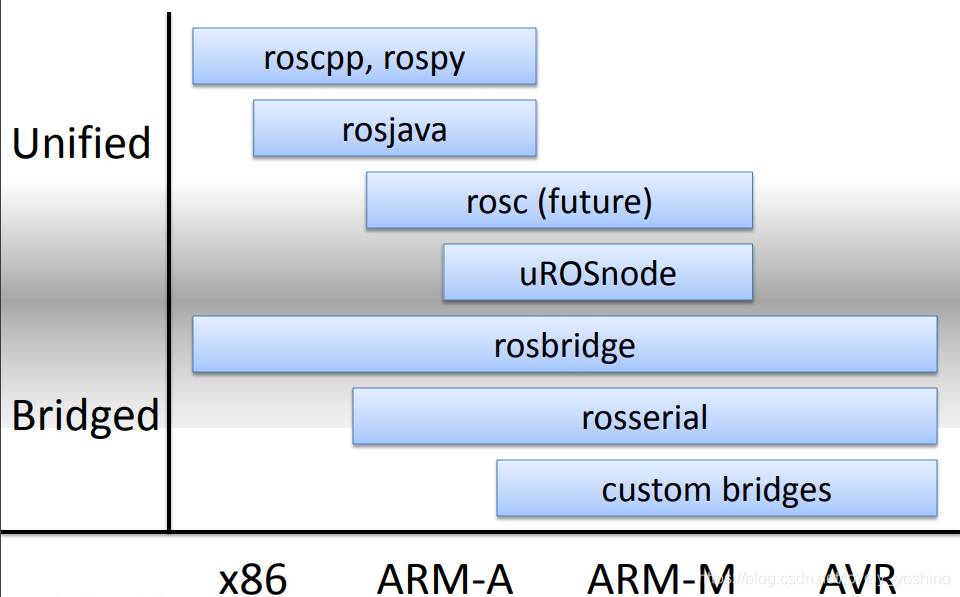
ros ROS是一个用于开发机器人应用程序的、类似操作系统的机器人软件平台。ROS提供开发机器人应用程序时所需的硬件抽象、子设备控制,以及机器人工程中广泛使用的传感、识别、绘图、运动规划等功能。此外ROS还提供...


ROS节点介绍 在ROS的世界里,最小的进程单元就是节点(node) 一个软件包里可以有多个可执行文件,可执行文件在运行之后就成了一个进程(process),这个进程在ROS中就叫做节点 从程序角度来说,node就是一个可执行...
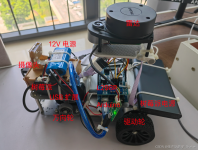
项目中使用到ROS系统做SLAM和导航,本人第一次接触Linux系统和ROS系统,看过一些书籍文章之后觉得二者很有意思,便记录下来供后期复习。
解决 vscode不能支持ROS相关头文件和没有智能提示问题vscode 编写pakage源文件代码,#include等头文件时报错,无法运行智能提示。

推荐文章
- php 上传图片 缩略图,PHP 图片上传类 缩略图-程序员宅基地
- scrapy爬虫框架_3.6.1 scrapy 的版本-程序员宅基地
- 微信支付——统一下单——java_小程序统一下单接口-程序员宅基地
- (已解决)报错 ValueError: Tensor conversion requested dtype float32 for Tensor with dtype resource-程序员宅基地
- 记录el-table树形数据,默认展开折叠按钮失效_eltable一刷新展开的子节点展开按钮消失-程序员宅基地
- 设计模式复习-桥接模式_csdn天使也掉毛-程序员宅基地
- CodeForces - 894A-QAQ(思维)_"qaq\" is a word to denote an expression of crying-程序员宅基地
- java毕业生设计移动学习网站计算机源码+系统+mysql+调试部署+lw-程序员宅基地
- 14种神笔记方法,只需选择1招,让你的学习和工作效率提高100倍!_1秒笔记 高级-程序员宅基地
- 最新java毕业论文英文参考文献_计算机毕业论文javaweb英文文献-程序员宅基地