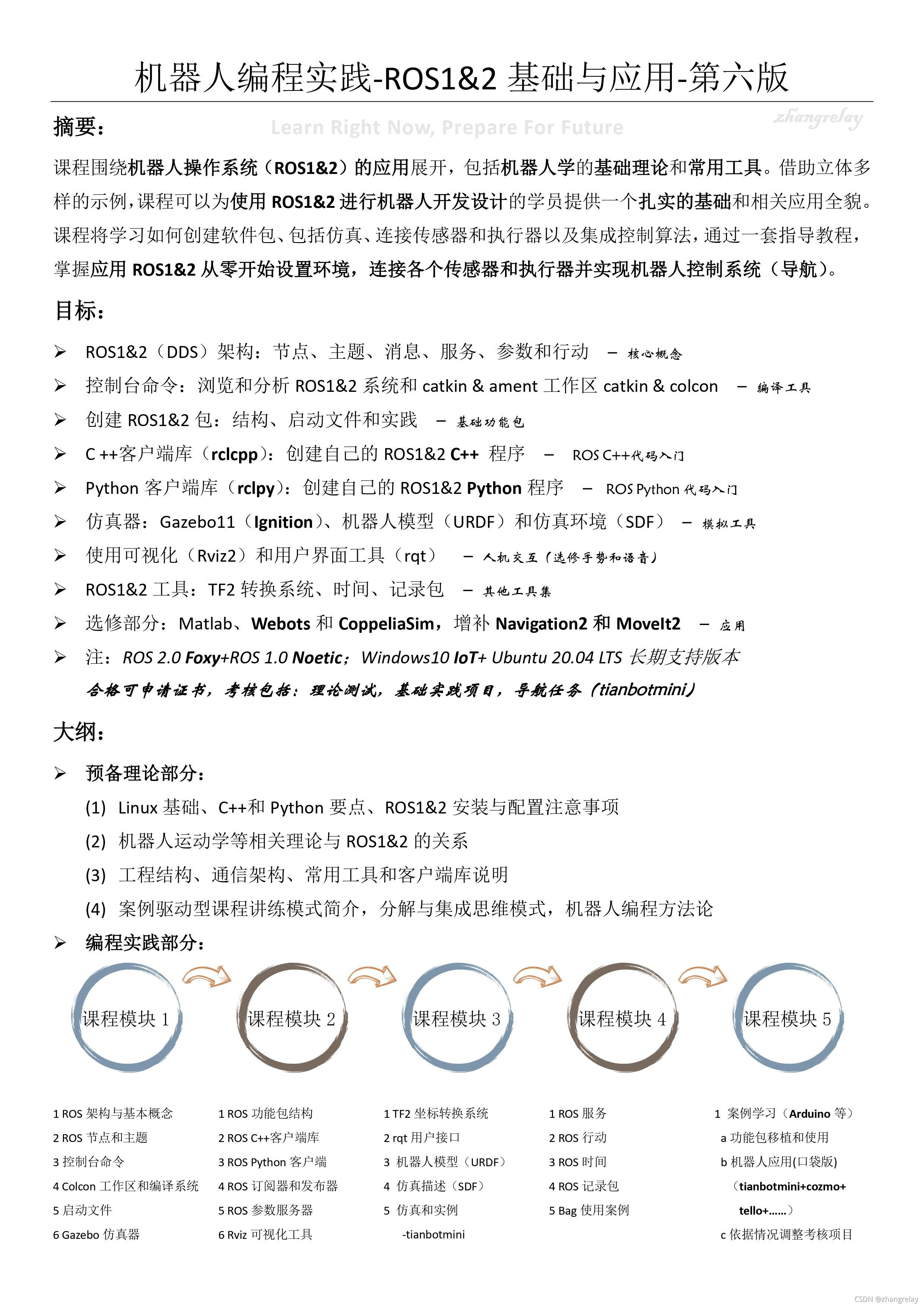
ROS:一些基本命令行
”ros“ 的搜索结果

基于ROS的点焊机器人仿真与控制项目源码.zip
一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌龟运动,要启动多个窗口,分别启动 roscore、乌龟界面节点、键盘控制节点。如果每次都调用 rosrun 逐一启动,显然效率低下,如何优化?...


基于ROS的四旋翼无人机群的简单控制源码.zip
ROS1中cpp 格式。ROS2中cpp格式。

M1芯片安装ROS
ROS实现人工势场法结合A算法_路径规划算法.zip
ros1使用gmapping建图。ros1动态避障_定点导航。

(一)ros::ok() 用于检查系统状态,适用于Publisher程序无限循环 语法: while(ros::ok()) { //... } ros::ok()在以下几种情况下会返回false: 1、按下Ctrl-C时。 2、我们被一个同名同姓的节点从网络中踢出。 3、...
激光SLAM自主导航小车 基于ROS melodic 底盘控制器源码+说明+演示视频.zip
基于STM32的智能小车下位机底盘控制器兼容ROS操作系统源码.zip

参考见b站赵虚左老师Ros入门课程视频p54在功能包内创建文件夹msg,并在文件夹内创建如图所示文件(坐标信息都是int类型的)配置package.mal文件配置CMakelist文件配置完后编译所有文件,在devel文件夹下会生成两种...
实验室有一台2020年购入的AGX Xavier计算平台,由于实车开发作实验较为麻烦,打算基于这台Xavier从头搭建一套缩小版的自动驾驶系统...平台基于朴为A30的阿克曼结构的车,底盘控制由CAN和串口输出,并提供了ROS接口。
ROS基于C++最优轨迹的生成源码+ppt文件.zip
Rosbag play系列指令 Rosbag play bagFile01.bag bagFile02.bag … 播放多个录制文件: 由于我们的bag录制文件并不是同一时间录制,因此bag录制文件会因录制顺序不同播放顺序也不同,同时两个录制文件播放的...
ROS2和ROS常用命令的异同

文章目录引言ROS系列文章ROS 消息文件自定义消息添加源码文件添加依赖修改编译规则尝试编译查看生成的消息源码文件使用自定义的消息关于ros::Time例程源码运行效果参考 引言 这篇文章讲解我们自己按需定义消息。 ROS...
ROS中rosbag命令常用方法 bag包修复 .bag.active文件修复

推荐文章
- EVO-CNN-LSTM-multihead-Attention能量谷算法优化模型结合多头注意力机制多维时序预测-程序员宅基地
- Objective-C 中的id到底是什么-程序员宅基地
- 好记性不如烂笔头---Archlinux优化简介-程序员宅基地
- 3DREM16P-7X/250YG24-8K4V比例减压阀放大器-程序员宅基地
- python文件操作(open()、write()、writelines()、read()、readline()、readlines()、seek()、os)_python open writeline-程序员宅基地
- 分布式限流实战--redis实现令牌桶限流_分布式令牌限流-程序员宅基地
- 【Linux】文件系统-程序员宅基地
- python实现ks算法_python, 在信用评级中,计算KS statistic值-程序员宅基地
- 类加载过程 与 代码的执行顺序_类加载后代码的执行顺序-程序员宅基地
- Oracle LiveLabs实验:Introduction to Oracle Spatial Studio_oracle_spatial 可视化-程序员宅基地