在ROS中,发布者(publisher)和订阅者(subscriber)用来做什么?下面哪个命令可以查看ROS节点的详细信息(包括发布和订阅的话题、服务等)?好的,下面是ROS基础知识考核试题,共10道选择题。下面哪个命令可以查看...
”ros“ 的搜索结果
容器解决方案:Snaps 将您的所有依赖项和资产捆绑在一个包中(包括 ROS),使您的应用程序可安装在数十个 Linux 发行版和跨发行版版本上。 严格限制:Snaps 被设计为安全且与底层系统和其他应用程序隔离,具有访问...
使用ros发布自定义的消息
标签: c++
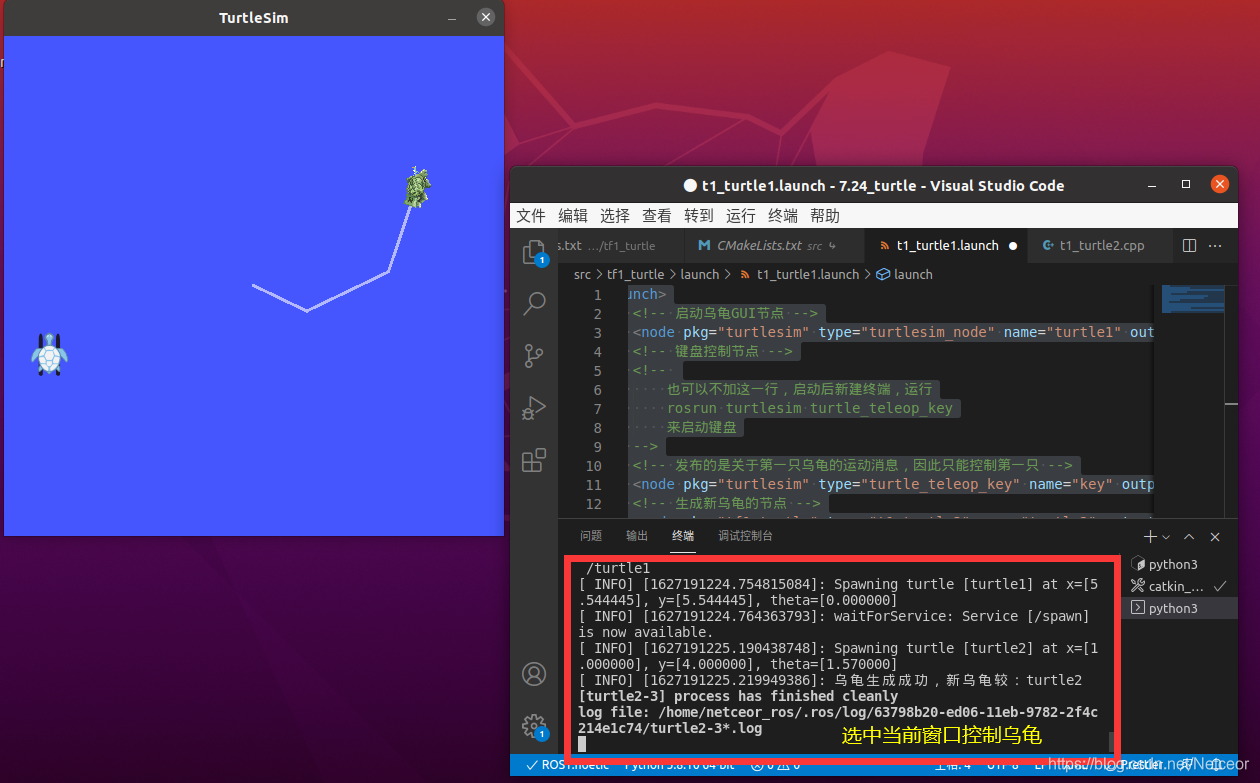
在拿相机玩ORB-SLAM3时涉及到了ROS topic的收发与时间同步问题,而且在得到相机位姿后还需要将位姿信息封装成一定的消息格式发布出去,这就又涉及到自定义消息的使用。以往只是在代码中改改相应的topic的名称就直接...


如果您的系统安装了anaconda,同时也安装了ROS,如何协调它们的环境,因为ROS安装后,默认要安装一个python而非anaconda,如何处理?






ROS | 机器人操作系统简介
标签: 经验分享


https://blog.csdn.net/shanpenghui/article/details/117282535 https://blog.csdn.net/weixin_37532614/article/details/109602947 https://blog.csdn.net/weixin_41010198/article/details/117042386
公众号:鱼香ROS QQ交流群:139707339 教学视频地址:小鱼的B站 完整文档地址:鱼香ROS官网 版权声明:如非允许禁止转载与商业用途。 2.3 安装ROS2 到了这一节,终于可以开始安装ROS2了。小鱼接下来会讲的比较细...

ROS常用基本命令(二)
标签: 机器人
在ROS中,有许多常用的基本命令可用于管理ROS软件包、构建和运行ROS应用程序,以及处理ROS数据流。请注意,这只是ROS命令的一小部分,ROS还有许多其他命令和工具可供使用。您可以使用该命令来查找、列出、验证和获取...
ROS2的每个版本都有其特点和改进。
一打开Vscode,Problems那一栏就是八九十条报错,基本都是找不到相关头文件引起的,相关文件里大片大片的波浪线。然后真的就不报错了!红色波浪线也都消失了!我又改回原来的写法,竟然也不报错了?...
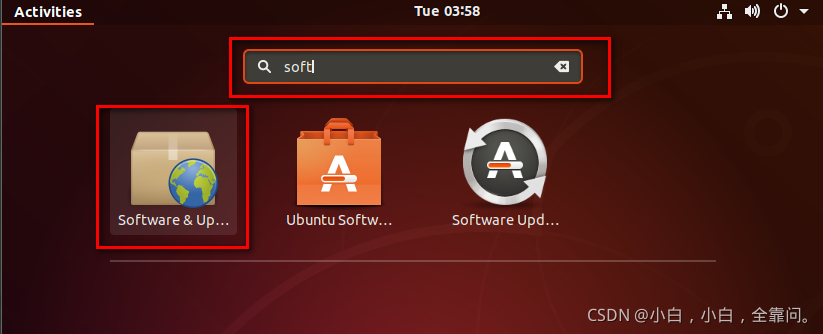
Ubuntu安装ROS系统步骤一、设置sources.list(设置软件源)二、设置key(公钥)三、更新package四、安装ROS五、初始化rosdep六、配置ROS环境七、安装依赖项八、测试ROS是否安装成功总结 步骤 提示: 使用中科大的源...
推荐文章
- php 上传图片 缩略图,PHP 图片上传类 缩略图-程序员宅基地
- scrapy爬虫框架_3.6.1 scrapy 的版本-程序员宅基地
- 微信支付——统一下单——java_小程序统一下单接口-程序员宅基地
- (已解决)报错 ValueError: Tensor conversion requested dtype float32 for Tensor with dtype resource-程序员宅基地
- 记录el-table树形数据,默认展开折叠按钮失效_eltable一刷新展开的子节点展开按钮消失-程序员宅基地
- 设计模式复习-桥接模式_csdn天使也掉毛-程序员宅基地
- CodeForces - 894A-QAQ(思维)_"qaq\" is a word to denote an expression of crying-程序员宅基地
- java毕业生设计移动学习网站计算机源码+系统+mysql+调试部署+lw-程序员宅基地
- 14种神笔记方法,只需选择1招,让你的学习和工作效率提高100倍!_1秒笔记 高级-程序员宅基地
- 最新java毕业论文英文参考文献_计算机毕业论文javaweb英文文献-程序员宅基地